特斯拉作為自動駕駛全球領先企業,已有技術積淀可在人形機器人中復用。公 司 宣布 將于 今 年 9 月 30 日推 出首 款 雙足 人形 機 器人- 擎天柱(“OPTIMUS”),Tesla Bot 將基于視覺神經網絡神經系統可預測性的自動管理技術,以 Dojo D1 自研超級計算機芯片和提供算力的 FSD Chip 2.0 硬件驅動微核心。從目前公布的應用范圍來看,人形機器人是服務機器人的技術升級,涉及自動控制、視覺導航、傳感器技術等多種技術的融合。作為美國最大的電動汽車及新能源企業,公司具有領先行業的自動駕駛技術,部分技術積累可復用于人形機器人中,如:AI芯片、自動駕駛算法和 AI 視覺解決方案,但也有一些新增部分需要從相關元器件廠商處采購,比如減速器、伺服電機等上游材料。
特斯拉雖然在智能汽車領域技術領先,但在人形機器人市場是新進入者。當前人形機器人領先企業波士頓動力與日本本田和特斯拉在產品定位與技術布局存在差異。從技術和產品成熟度來看,波士頓動力在行業中處于領先地位,專注于提升“運動智能”的能力,最開始是以軍用機器人為出發點,屬于專業領域,但還沒有找到合適的商業化途徑;日本本田嘗試將ASIMO 應用于教育、接待、娛樂等各類場景 ,并計劃利用 ASIMO 驅動機構、控制算法等進一步研發具備看護、護理等功能的服務機器人。特斯拉則從家用、商用切入服務領域實現商業化。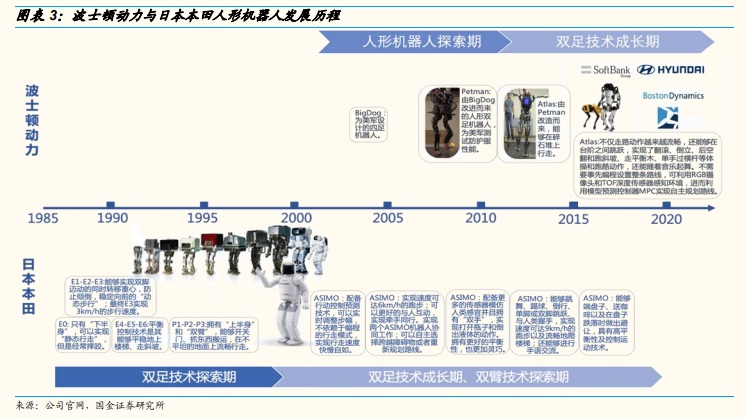
特斯拉的雙臂雙足等協同技術仍缺乏沉淀。人形機器人的核心難點是雙足技術,重心和動作的配合很重要。重心控制方面汽車到機器人跨度非常大,從高維向低維。另一核心難點雙臂控制,行業總體還處于起步階段,參考谷歌、三星、戴森等 IT 巨頭,都采用單臂,控制難度較小。在工業方面,南方許多工廠使用機械臂代替人工進行高精尖工作,商業價值明確,但很難將技術移植到服務機器人上:因為機械臂在工廠里處于固定位臵,與目標點的距離固定。服務機器人有兩條手臂,目標距離隨時變化,對傳感器精度、算法和目標跟蹤提出了更高的要求,除了能準確捕捉目標外,更不能互相干擾。