多場景特征決定了多模態交互屬性,服務機器人需突破三大核心技術模塊。從技術的角度來看,服務機器人的多場景屬性決定了其交互方式的多元化智能型服務機器人涉及到語音、語義分析、情感分析、動作捕捉等多個維度的交互。我們認為,要達到人機融合的程度,需要突破三方面的核心技術模塊,分別是環境感知模塊、人機交互及識別模塊、運動控制模塊。
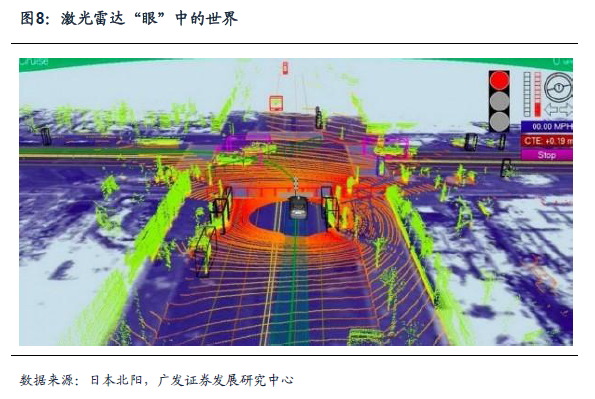
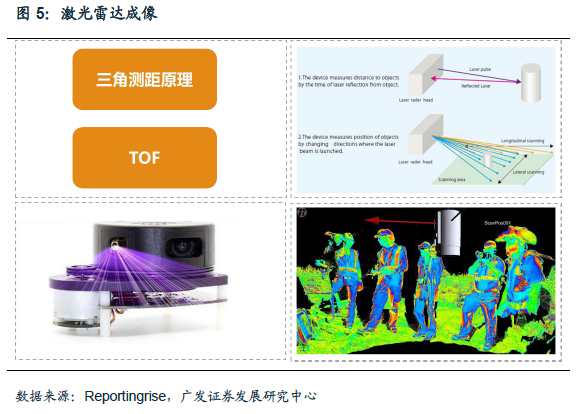
感知模塊:多傳感融合是未來大趨勢,低成本SLAM+激光雷達是核心。服務機器人要實現智能化的交互體驗,首先要具備環境感知能力。感知方式中,采用多傳感融合是大趨勢,包括視覺識別、結構光、毫米波雷達、超聲波、激光雷達等。考慮到家庭和公共場合的應用場景,未來低成本的激光雷達+SLAM方案是不錯的選擇。隨著商業化加快,激光雷達也有望邁向低成本化。
交互模塊:語音識別已達到商用門檻,語義理解仍然提升。伴隨計算能力的提升,自動語音識別(ASR)識別能力越來越強。目前不少企業的語音識別錯誤率已經達到了實用門檻。而在語義理解方面,詞法和句法基本解決,語義目前僅是淺層處理,自然語言處理仍然困難重重,未來有望伴隨深度學習算法得以突破。除了語音交互方式外,圖像識別算法突破也將會對語音語義交互領域形成補充。
運控模塊:步態和非步態,不是替代而是共生。運動控制模塊增強了服務機器人的移動和運動屬性,目前家用服務機器人大多以電機控制為主。從產品屬性看,有步態行走和萬向輪為代表的非步態行走,我們認為二者互有優劣,存在場景差異,不存在替代關系,可以共存。舵機是運控領域里比較核心的部件,對價格敏感,目前國內已經有企業突破了服務機器人專用舵機技術。
其他模塊:AI智能芯片通用與專用并行,操作系統領域國產系統正在孕育。芯片是是機器人的大腦,包括通用芯片和專用芯片,對于機器人來說,通用芯片和專用芯片各有千秋,未來各司其職,涉及到深度神經網絡,通用芯片中GPU和FPGA在解決復雜運算上優于傳統CPU。操作系統方面,目前主要以ROS和安卓系統為主,TuringOS、iBot OS等國產系統也在不斷突破和孕育。