本文從信息鏈條和技術兩個維度構建掃地機器人技術框架。我們從信息鏈條出發,將掃地機器人運行流程視為信息輸入、處理到輸出的過程,并將技術解構為系統、模塊、硬件和軟件四個層次,與信息鏈條各環節一一對應,從而構建起涵蓋掃地機器人各種功能原理與各類軟硬件技術的分析框架(見圖 1)。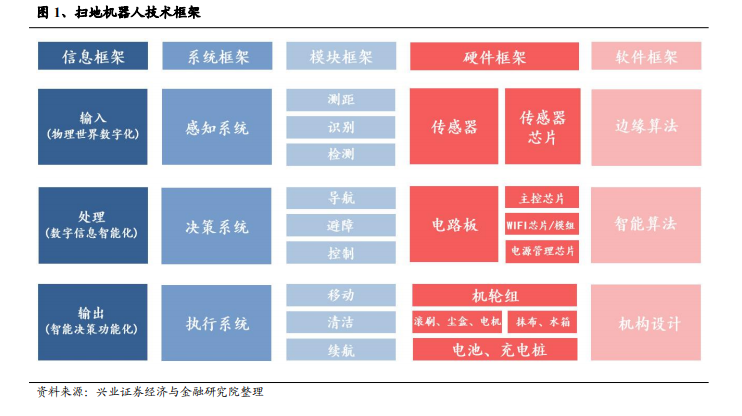
激光雷達一般由光源、光束操縱和探測器三部分組成。光源發射的激光光束經光束操縱后產生角度偏轉,由探測器接收光束打在目標物上產生發射/散射的部分回波,根據測距原理計算得出激光雷達到目標點/線的距離。通過不斷掃描目標物,可得到目標物上全部點/線的距離信息,經過成像處理后便可生成三維立體圖像。根據同時發射的激光線束多寡,可分為單線激光雷達和多線激光雷達(4 線、8線、16 線、32 線、64 線、128 線等)。線束越多,回波越密集,精度越高,相應的成本和算力要求也越高。考慮到成本因素和室內環境較為簡單,掃地機器人一般采用單線激光雷達,而多線激光雷達多應用于成本接受度較高、運行環境較為復雜及安全性要求較嚴格的自動駕駛領域。
IMU(慣性測量單元)主要由陀螺儀和加速度計組成,電子羅盤則是提升 IMU測量精度的輔助傳感器。三者主要用于實時檢測物體運動的變化信息。其中,陀螺儀測量掃地機器人的角速率,以原始方位(初始點一般為基站所在地)作為初始條件,對角速率進行積分,進而實時計算掃地機器人當前所處方位;加速度計測量掃地機器人的加速度,利用 a=F/M 原理可測量線加速度,對線加速度一次積分得到速度,二次積分得到位移。結合陀螺儀測得的方向信息和加速度計測得的位移信息,便可實時得到掃地機器人相對于初始點的位置信息。之后再經由電子羅盤輔助確認掃地機器人水平位置的朝向,使姿態參數更為精確。由于姿態信息是經過積分計算產生,定位誤差會隨時間推移而增大,長期積累會導致精度降低且每次使用前需耗費較長時間進行初始調整,故陀螺儀/加速度計代表的局部規劃導航(慣性導航)逐漸被全局規劃導航(LDS-SLAM/V-SLAM)取代。但由于陀螺儀/加速度計/電子羅盤獲取姿態信息時不依賴于環境信息,在環境條件較差的場景下依然能夠進行測量,所以一般作為測量的輔助和補充,這也是這三類傳感器仍常見于全局規劃導航類產品的原因。