優秀的車載激光雷達需要具備良好的測遠能力、精度、高清晰度,高性價比和低功耗。具體來看,假設高速路段行駛速度為 100km/h 約合28m/s,一般情況下 100km/h 到 0km/h 制動需要 3-4 秒左右,所以高速剎車制動距離為 100-150m。對于自動駕駛主雷達,為了保證高速行駛安全,激光雷達探測距離需要在 200-250m 以上較為安全。擁有良好的測遠能力意味著留給系統進行感知和決策的時間越長,安全性更好。擁有良好的角分辨率使探測器對探測目標物有好清晰度和識別能力。同時,低功耗在實際應用當中對安全有巨大幫助, 更少電能消耗,意味著獲得更多續航里程。
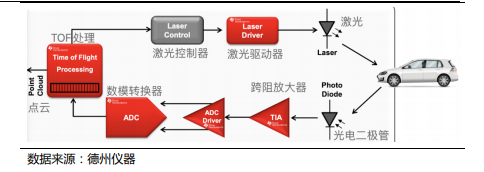
激光測距單元由激光源、光學鏡頭、光電探測器和信號處理器組成。激光發射器通過光學鏡頭發射激光,再由光電探測器系統將光轉化為電信號,最后由信號處理單元計算并比較收到信號和發送信號的異同來獲取環境信息。不同的測距原理會有不同的信號處理方法。激光雷達具有很高的產業附加值。激光雷達行業上游是光學及電子元器件;中游是不同類別的激光雷達;下游是車輛、智能制造、智慧城市等多場景、多行業應用。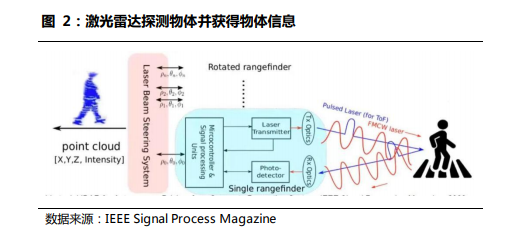
TOF 是目前最為成熟和廣泛應用的測距方式,根據光反射回的時間測距離。具體來說是通過用脈沖激光照亮目標并測量反射返回信號的特性來工作。脈沖光的寬度范圍可以從幾納秒到幾微秒。TOF 激光雷達主要部件有激光器、放大器、光電轉換器等。TOF 激光源目前有 905nm 和
1550nm 兩種,通常情況下 905nm 探測距離為 100-200m,由于靠近 可見光對人眼有影響,因此難以通過加大功率增加探測距離,導致探測距離有限。1550nm 探測距離能達到 250m,且有更好的安全性,但由于 1550nm 接收器需要采用銦鎵砷光電探測器芯片,導致當前成本較高。