自動駕駛主要分為 L0-L5 五個級別,L3 級以上提升對系統感知的要求。國際自動機械工程師學會(SAE)將自動駕駛分為 L0-L5 五個級別,其中系統在L1-L3 級階段主要起輔助作用。從 L2 級升至 L3 級,車輛的操作控制對象發生了主要變化,L2 級及以下仍舊由駕駛員負責環境的感知;L3 級及以上則由系統負責環境的感知和系統全部動態駕駛任務,駕駛員不需要一直對方向盤進行掌控,僅需在特殊情況發生時對系統提出的干預請求進行回應。當自動駕駛級別上升至 L4級車輛駕駛便全由系統負責, L5 與 L4 的區別在于是在特定場景還是全場景的應用。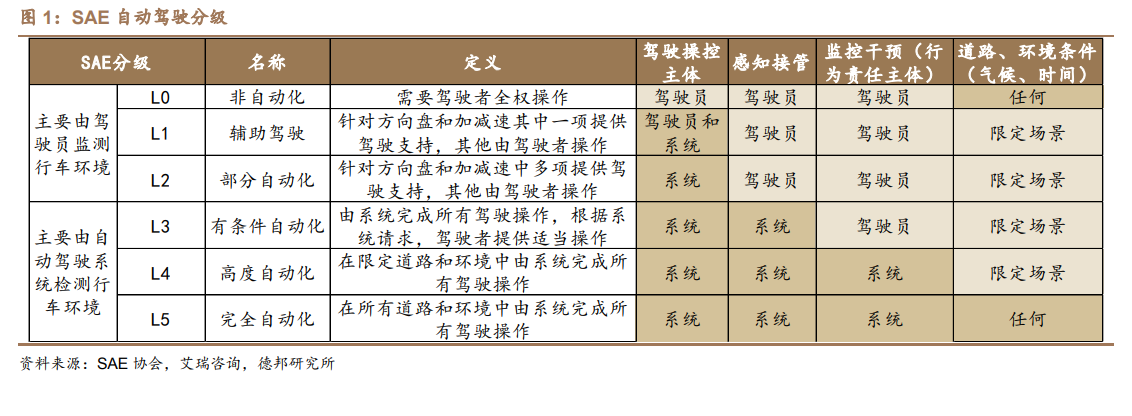
自動駕駛可以分為感知層、決策層、執行層,其中感知器主要包括車輛運動、環境感知兩大類。車輛運動傳感器為車輛運行過程中相關速度、角度提供全姿態的信息參數和高精度的定位信息,環境感知傳感器主要由激光雷達、毫米波雷達、超聲波雷達、攝像頭等組成,將感知的數據融合提供給決策處理層,決策層通過中央處理系統、芯片、算法等將接收到的數據進行處理,最終輸出相應的操作與指令任務給執行層,執行層則負責對此完成相應的動力供給、方向控制、車燈控制等動作。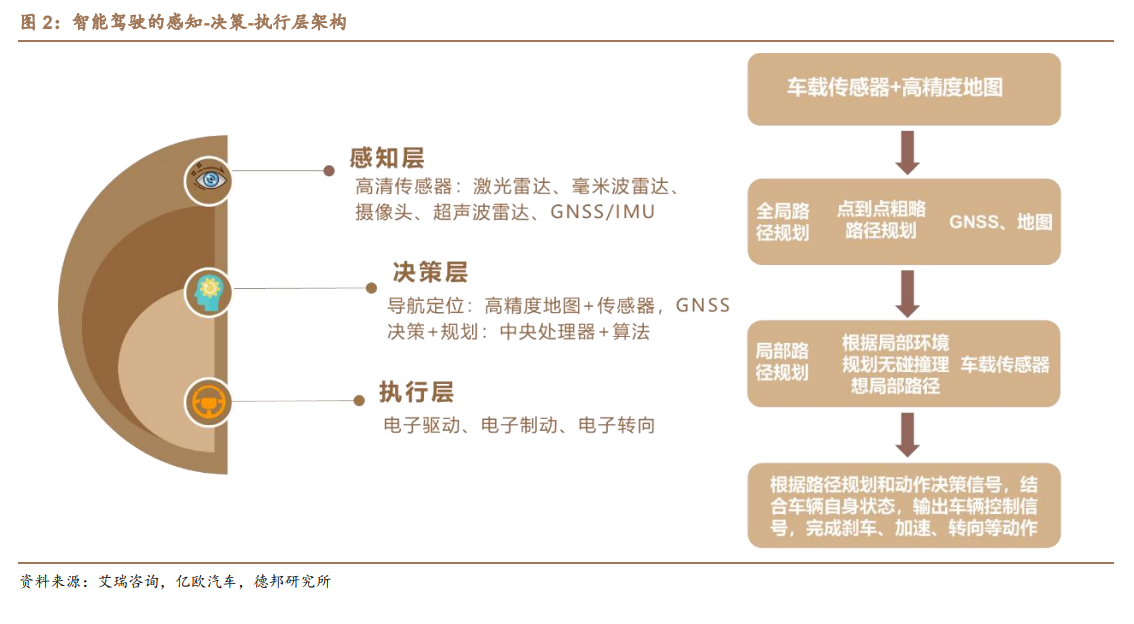
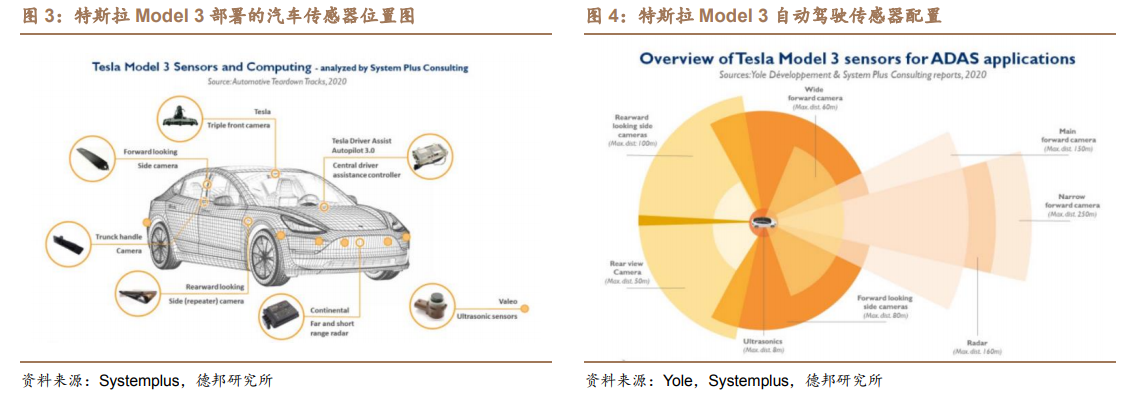
純視覺路線以攝像頭為主導,由于攝像頭精確度較低,所以一般對于算法和計算能力的要求更高。特斯拉通過“D1 人工智能芯片+Dojo 超級計算機群+無監督學習算法”打造純視覺路線的底層支撐,D1 芯片作為 Dojo 超級計算機系統的一部分,可以將攝像頭內收集到的視頻數據進行無監督學習算法的模型訓練,減少人工標注的工作量。攝像頭成本較低,但劣勢在于攝像頭在黑暗環境中精度有所下降,因此對數據樣本庫的容量和模型的精度要求較高。超聲波雷達、毫米波雷達、激光雷達等雷達類測距傳感器融合方案精確度更高,但是由于技術尚未完全成熟,量產的成本高昂。