
自動駕駛可分為感知、決策、執行三大步驟,其中感知主要由安裝在汽車上的各類環境監測傳感器完成。當前環境監測傳感器主要包括車載攝像頭、超聲波雷達、毫米波雷達、激光雷達等。出于結構設計、器件成本、良率與一致性、研發投入、車規及可量產性等多方面因素,當前激光雷達單車成本仍遠高于其他傳感器件。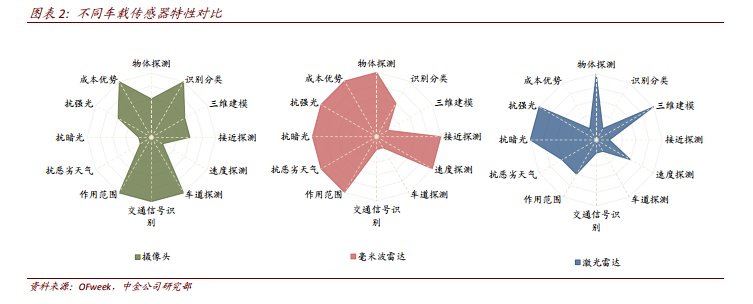
激光雷達對比車載攝像頭:攝像頭在物體外觀及分類的識別上性能突出,但單純依賴視覺方案存在以下隱患:1)光照依賴:光照情況不良時(強光/逆光/夜晚/惡劣天氣),作用大幅受限;2)須 2D 轉 3D:獲取 2D 信息,需經算法處理轉換為 3D 信息,在精確度和時效性不及能直接從外界獲取位置信息的激光雷達;3)算力及成本:光學方案下,成熟算法要求海量數據作為訓練基礎以及更高芯片算力保障,相應成本水漲船高。
激光雷達并非完美,不同傳感器需配合打造感知系統“完全體”:受制于激光的物理特性,激光雷達在雨雪、沙塵等極端天氣環境下,工作可靠性會受到影響。伴隨智能駕駛級別提升,需要不同種類的傳感器達成冗余、相互配合。我們認為,在現有技術下,對于 L4-L5 高級別自動駕駛而言,激光雷達在傳感器組合中具備不可替代性,仍為必備元件,與光學傳感、雷達及 MEMS 傳感器配合,共同打造感知系統“完全體”。

