激光雷達屬于感知設備,其通過發射接收激光束,實現對外界環境的3D建模。激光雷達不斷向外發射激光束,并接收物體反射回的光脈沖,根據已知光速計算出兩者信號之間的時間差、相位差來確定車與物體之間的相對距離,再通過水平旋轉掃描或相控掃描測量物體的角度,通過獲取不同俯仰角度的信號獲得高度信息。感知到與物體之間的距離、角度等信息后,再通過軟件算法去做 3D 建模,構建一個機器能夠理解的虛擬模型。
分類和組成:分為機械、半固態、固態,重點是光電元件。激光雷達分類:一般分為機械式、半固態、固態。機械式多用于無人駕駛,其體積大、價格高,不適合量產車。高級輔助駕駛汽車上目前以轉鏡、MEMS的半固態激光雷達為主。中長期隨固態激光雷達技術逐漸成熟,有替代半固態的可能性。激光雷達組成:主要包括激光發射、接收、掃描、信息處理四個子系統。從核心零部件上看,激光雷達由發射器,接收器,配套的芯片,以及光學掃描件構成。激光雷達廠商負責整體設計,絕大部分零部件外購。外購的零部件有激光器(發射器主要部件)、探測器(接收器主要部件)、芯片,光學部件由激光雷達廠商自主研發設計,再由代工廠生產加工。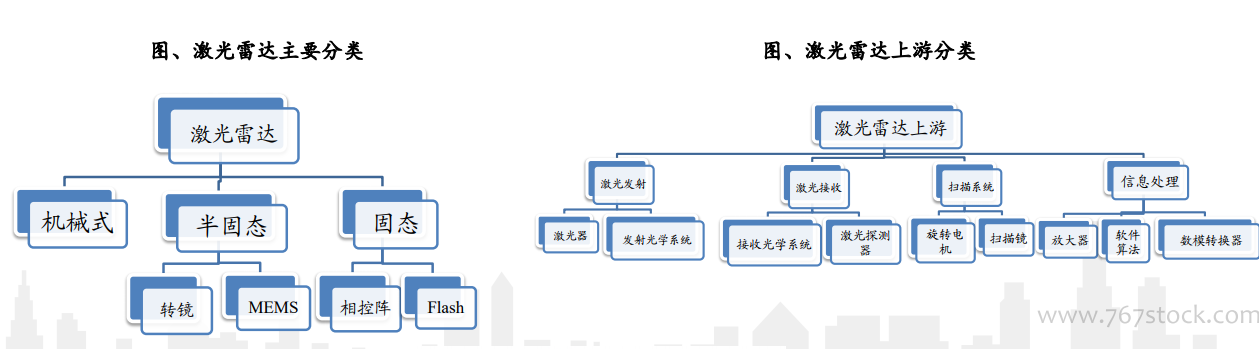
產業鏈上游:主要是激光器、探測器、芯片、光學部件。上游芯片分為主控芯片和模擬芯片,國外供應商大幅領先。激光雷達的主控芯片通常為FPGA,主控芯片也可以用MCU、DSP替代。激光雷達系統中發光控制、光電信號轉換、電信號實時處理等關鍵子系統需要用到模擬芯片,國外供應商的產品性能相比國內供應商大幅領先。光學部件由激光雷達公司設計,供應商加工,國內供應商具備完全勝任能力。光學部件方面,激光雷達公司一般為自主研發設計,然后選擇行業內的加工公司完成生產和加工工序。光學部件國內供應鏈的技術水平已經完全達到或超越國外供應鏈的水準,且有明顯的成本優勢,已經可以完全替代國外供應鏈和滿足產品加工的需求。