路徑之爭:激光雷達為什么是 L4 自動駕駛不可或缺的傳感器?自動駕駛的環境監測傳感器主要包括攝像頭和雷達兩類:1)攝像頭通過圖像識別技術實現距離測量、目標識別等功能;2)雷達利用發射波和反射波之間的時間差、相位差獲得目標物體的位置和速度等數據,按所使用的不同類型的波,雷達可以分為毫米波雷達、激光雷達、超聲波雷達三類。在攝像頭方面,按視野覆蓋位置可分為前視、環視(側視+后視)及內視攝像頭,其中前視攝像頭最為關鍵,可以實現車道偏離警示系統(LDW)、前向碰撞預警系統(FCW)、行人識別警示(PCW)等功能。前視攝像頭又有單目攝像頭、雙目攝像頭,乃至多目攝像頭等不同的解決方案。雖然雙目或多目攝像頭具有更高的測距精度和更廣的視角,但由于其成本較高以及對精度和計算芯片的高要求,使得其仍未能大規模量產,目前以 Mobileye領銜的單目攝像頭解決方案是市場的主流。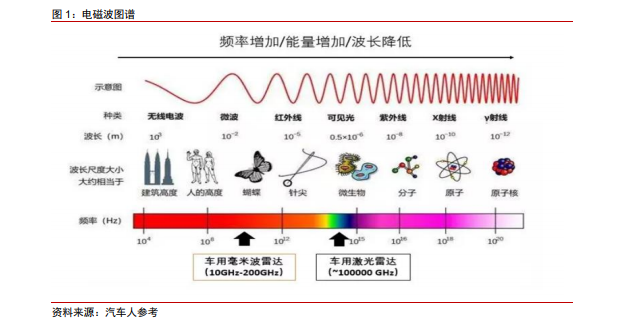
與雷達工作原理類似,激光雷達通過測量激光信號的時間差和相位差來確定距離,但其最大優勢在于能夠利用多譜勒成像技術,創建出目標清晰的 3D 圖像。激光雷達通過發射和接收激光束,分析激光遇到目標對象后的折返時間,計算出到目標對象的相對距離(圖6),并利用此過程中收集到的目標對象表面大量密集的點的三維坐標、反射率和紋理等信息,快速得到出被測目標的三維模型以及線、面、體等各種相關數據,建立三維點云圖,繪制出環境地圖,以達到環境感知的目的。由于光速非常快,飛行時間可能非常短,因此要求測量設備具備非常高的精度。從效果上來講,激光雷達維度(線束)越多,測量精度越高,安全性就越高。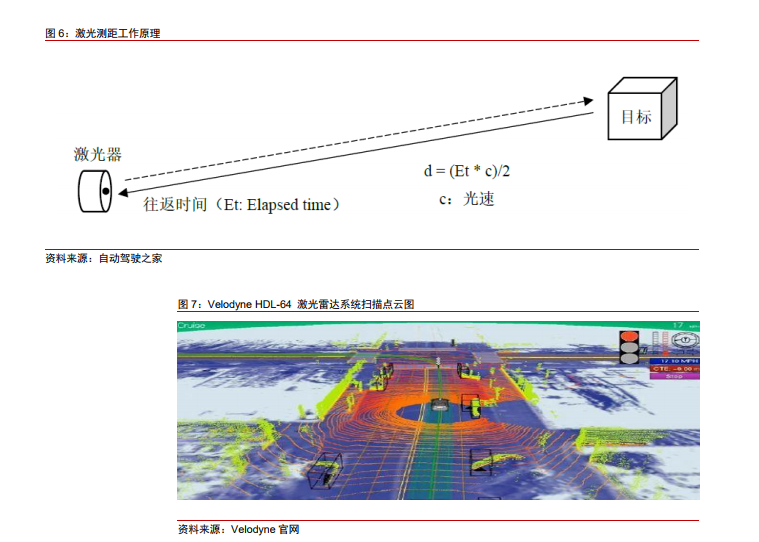
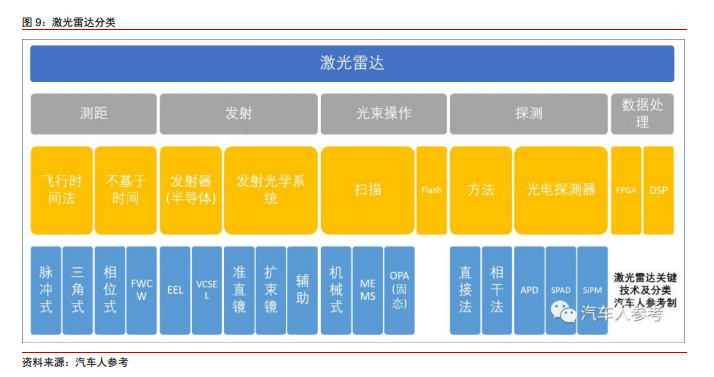
激光雷達主要包括激光發射、掃描系統、激光接收和信息處理四大系統,這四個系統相輔相成,形成傳感閉環。首先激光發射系統中激勵源周期性地驅動激光器,發射激光脈沖,激光調制器通過光束控制器控制發射激光的方向和線數,最后通過發射光學系統,將激光發射至目標物體;掃描系統負責以穩定的轉速旋轉起來,實現對所在平面的掃描,并產生實時的平面圖信息;激光接收系統中光電探測器接受目標物體反射回來的激光,產生接收信號;信息處理系統中接收信號經過放大處理和數模轉換,經由信息處理模塊計算,獲取目標表面形態、物理屬性等特性,最終建立物體模型。