自動駕駛已成為汽車行業發展的確定性趨勢。自動駕駛最大的意義在于解放駕駛員的雙手,帶來人類空間意義首次的無縫連接,智能汽車使汽車的角色不再局限于交通工具,可以是移動的生活空間,通訊工具,娛樂平臺等更富有想象力的定位。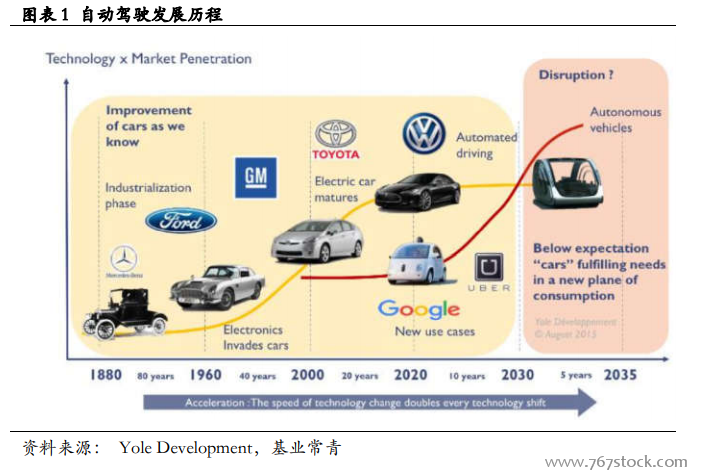
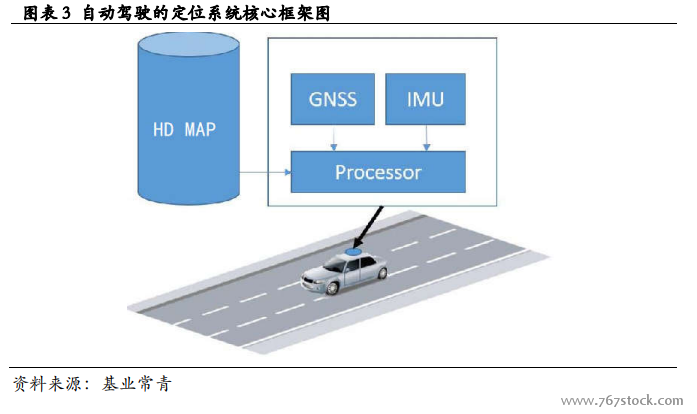
自動駕駛使用的定位系統是以高精地圖為依托,通過慣性傳感器(IMU)和全球定位系統(GNSS),來定位車輛的位置。高精地圖(HD MAP)為車輛環境感知提供輔助,提供超視距路況信息,并幫助車輛進行規劃決策;慣導系統是不依賴于外部信息、使用慣性傳感器來進行定位的自主式導航系統;全球定位系統是通過衛星信號定位,使用三角定位法定位地球表面或近地空間的任何地點的定位系統。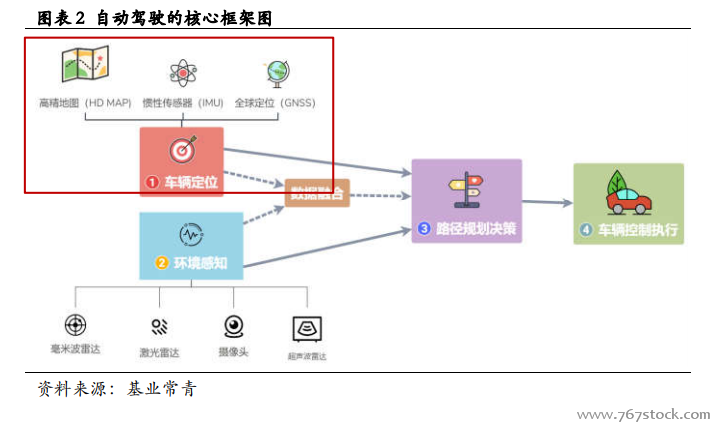
GNSS-RTK 技術的定位結果精度較高且穩定,目前已廣泛應用于自動駕駛導航系統中, 但該方法也有比較明顯的缺陷——依賴衛星信號。定位成功至少需三顆可見衛星,然而在實際的運行環境中,例如城市峽谷,由于多路徑效應、衛星信號被遮擋等原因,會使可見星數目不足,這種情況將影響 GNSSRTK定位和測速的精確性以及其可靠性。