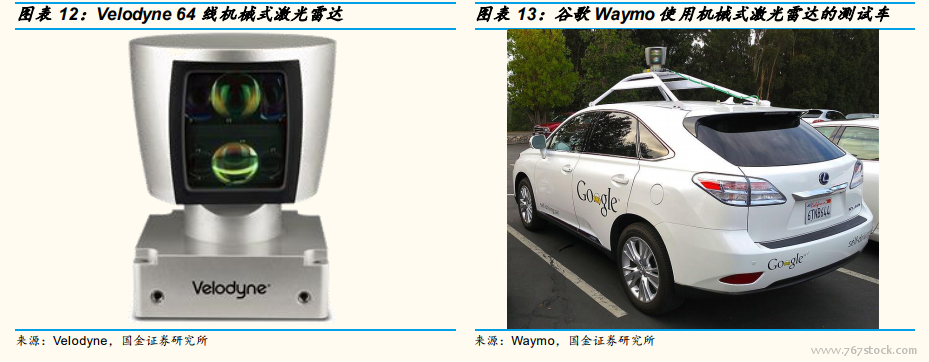
激光雷達:3D 環境建模使其成為核心傳感器,但惡劣天氣下性能下降、且無法識別圖像及顏色是其短板。在自動駕駛不斷進化的過程中,憑借獨有的 3D 環境建模,激光雷達已經成為自動駕駛多傳感器融合最核心的部分;在 L3 及以上自動駕駛傳感器解決方案中,激光雷達至少需要 1 個。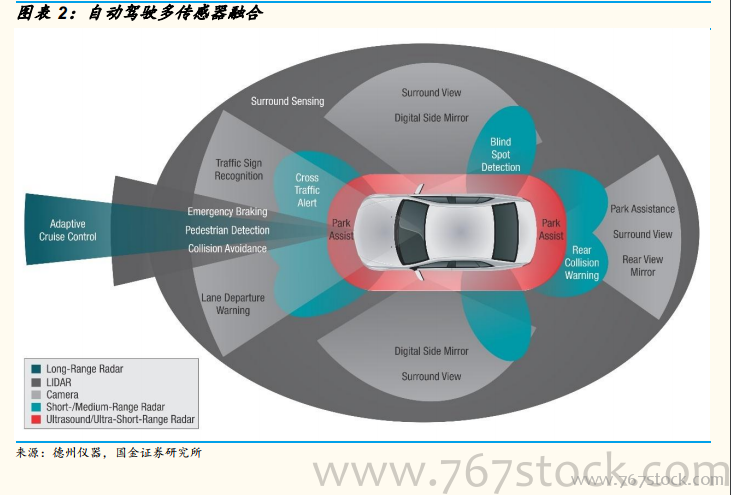
毫米波雷達:全天候工作使其不可或缺,但分辨率低,同樣難以成像。相比于激光雷達,毫米波雷達技術已經非常成熟,從上世紀 90 年代開始應用于自適應巡航,2012 年英飛凌推出 24GHz 單片雷達方案,陸續拓展到 ADAS 的各個功能模塊,是現階段的主力傳感器,全球出貨量早已超過千萬級。
攝像頭:自動駕駛的眼睛識別標識、物體,但無法點陣建模、遠距測距。攝像頭技術最為成熟,車載應用起步最早,在 ADAS 階段作為絕對主流的視覺傳感器,根據功能不同需要 4 個到 8 個攝像頭,應用在車道監測、盲點監測、障礙物監測、交通標志識別、行人識別、疲勞駕駛監測、倒車影像、360 全景影像等等。
將是自動駕駛傳感器的核心部分。首先,激光雷達提供生成環境的 3D 點云圖像提供一系列的(x,y,z)坐標,與已有的高精度地圖上的坐標進行對比,就可以很精確地做出車輛定位。同時在感知功能上,激光雷達點云圖像比攝像頭少了一步處理步驟(數字化),即攝像頭圖片需要進行數字化處理后才能由計算機進行判斷物體類型等工作,而激光雷達生成的點云(實際是 TOF 數據)只需簡單運算就可得到坐標數據,方便進一步的判斷。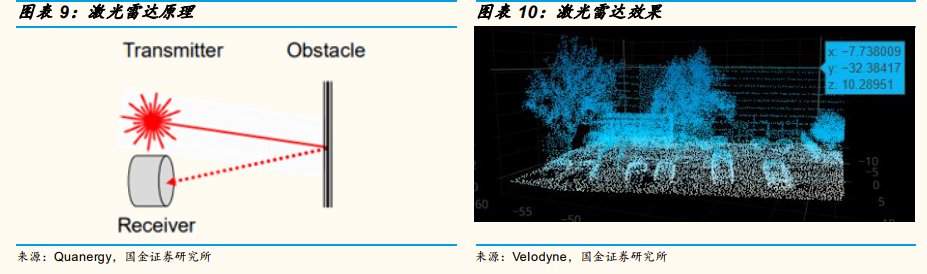
激光雷達工作原理。激光雷達(LiDAR)能釋放多束激光,接收物體反射信號,計算目標與自身的距離。應用較多的是利用反射信號的折返時間計算距離(Time ofFlight),也有連續波調頻(CWFM)方法。與雷達和攝像頭相比,激光雷達可以通過多束激光高頻發射獲取的反射數據形成周邊物體的高清 3D 的“點云”圖像。