激光雷達 21 世紀初引入汽車領域,隨 ADAS 滲透率提升迎來快速發展。激光雷達最先用于地圖測繪領域,高精度要求使得激光雷達成本居高不下。Velodyne 將激光雷達應用到 DARPA 無人駕駛汽車挑戰賽,首次將激光雷達帶入了自動駕駛領域。其后隨著 ADAS等下游應用的持續發展,激光雷達領域企業不斷增多,隨著研發的持續進行,激光雷達的產品性能穩步提升,成本大幅下降,行業也迎來了長足的發展。
激光雷達產品可以從顯性參數、實測性能表現及隱性指標等方面進行評估和比較。顯性參數主要指列示在產品參數表中的信息,主要包含測遠能力、點頻、角分辨率、視場角、精準度、功耗和集成度等。實測性能表現則主要指在實際使用激光雷達的過程中所測得的產品性能,其決定了無人駕駛汽車和服務型機器人對周圍環境的有效感知距離。相比于顯性參數,用戶會更加關注實測性能,但激光雷達作為近年來才在市場獲得較高關注度的新興產品,能夠參考的公開測試數據有限。隱性指標包含激光雷達產品的可靠性、安全性、使用壽命、成本控制、可量產性等,這些指標更加難以量化,也缺乏公開信息。
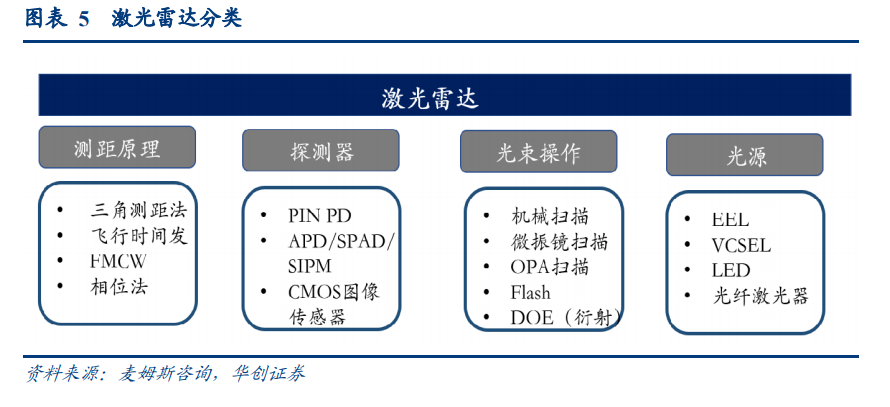
激光雷達的技術路線有四個主要的維度:測距原理、光源、探測器、光束操縱。激光雷達主要包括激光發射、掃描系統、激光接收和信息處理四大系統,四個系統相輔相成。根據這四個系統的不同特征,可以從四個不同維度來闡述激光雷達技術路線。其中光源和探測器即激光雷達的發射端與接收端,光束操縱即激光雷達的掃描方式,測距則為信息處理提供距離信息。根據四個主要的維度可以將激光雷達進行分類,每個不同分類方式又可進一步細分為不同的技術路線,不同路線之間存在較大差異。