機器人電機須符合的主要要求。機器人關節的運轉對驅動電機提出了較高要求,在靈活度上,要求其有最大功率質量比和扭矩慣量比、高起動轉矩、低慣量;在性能上,伺服電動機須有較高的可靠性、穩定性,同時需能快速響應,具有較高的可靠性和穩定性;在動作上,能夠控制特性的連續性和直線性;在速度上,要求較寬廣且平滑的調速范圍;在形態上,體積小、質量小、軸向尺寸短,且能經受得起苛刻的運行條件。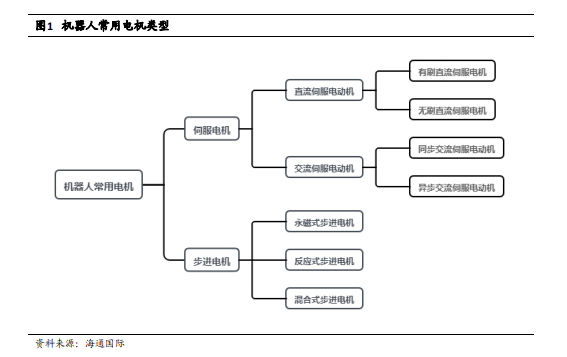
直流伺服電動機。直流伺服電動機,分為有刷直流伺服電機和無刷直流伺服電機。有刷直流伺服電機,優點是成本低,結構簡單,啟動轉矩大,速度調節范圍寬,控制容易,維護方便。缺點是會產生電磁干擾,對環境有要求。無刷直流伺服電機,具備體積小,重量輕,出力大,轉動平滑,力矩穩定,高速且靈敏等優勢,容易實現智能化,其電子換相方式靈活,可以方波換相或正弦波換相。電機免維護,不存在碳刷損耗的情況,效率很高,運行溫度低,不易產生火花,噪音小,電磁輻射小,壽命相對較長。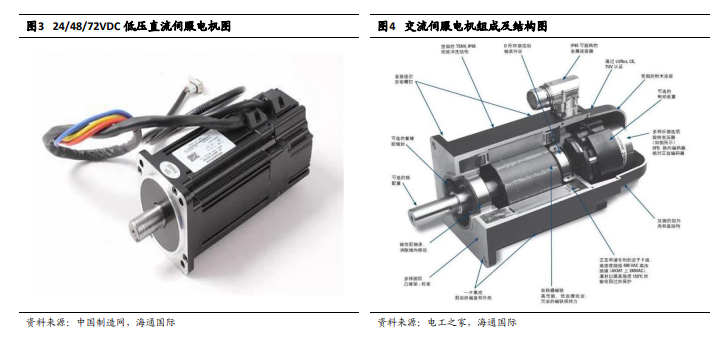
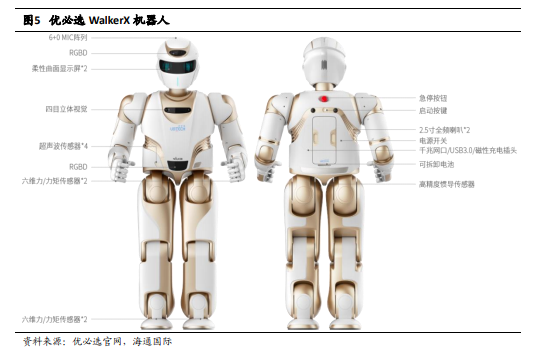
優必選 Walker X 機器人。Walker X 高度模仿人的身體結構,身高 1.3 米,體重 63 公斤,41 個高性能伺服驅動關節,面部 160°環繞 4.6K 高清雙柔性曲面屏。整體外部光滑圓潤,沒有明顯的棱角,關節部位沒有外露的機械限位結構,非常符合其家庭服務的定位。此外,WalkerX 具備開放、靈活、豐富、便捷的 AloT 接口,能夠依據用戶習慣和場景,自主控制燈光、冰箱等常見的 AloT 設備,全方位滿足智能家具場景的應用。