
起步較晚的國內工業機器人技術代差明顯。我國工業機器人產業化起于2000 年,而工業機器人“四大家族”:庫卡、ABB、安川、發那科公司分別在1974 年、1976 年、1978 年和1979 年開始了全球專利布局。目前,這四家企業在中國市場占有率總共達到八成以上,前三家在全球的機器人銷量都突破了20 萬臺,且在我國申請大量本土專利,工業機器人國產化進程緩慢。工業機器人核心零部件關鍵技術主要分為以下三類:控制器(控制技術),減速機,機器人專用伺服電機及其控制技術。
因上述兩點,國內目前的工業機器人企業普遍集中于系統集成領域,毛利率低訂單分散。受限于無法掌握三大零部件核心技術,國內的機器人的產品以系統集成為主,占比約為64%,系統集成的項目大部分是非標準化的,訂單驅動員工人數同比例增長,在生產和銷售上未能形成規模效應。單個公司市場份額較小,行業競爭格局較為分散。核心技術的缺失和訂單的非標準化導致了國內傳統工業機器人企業的ROE 難以提升。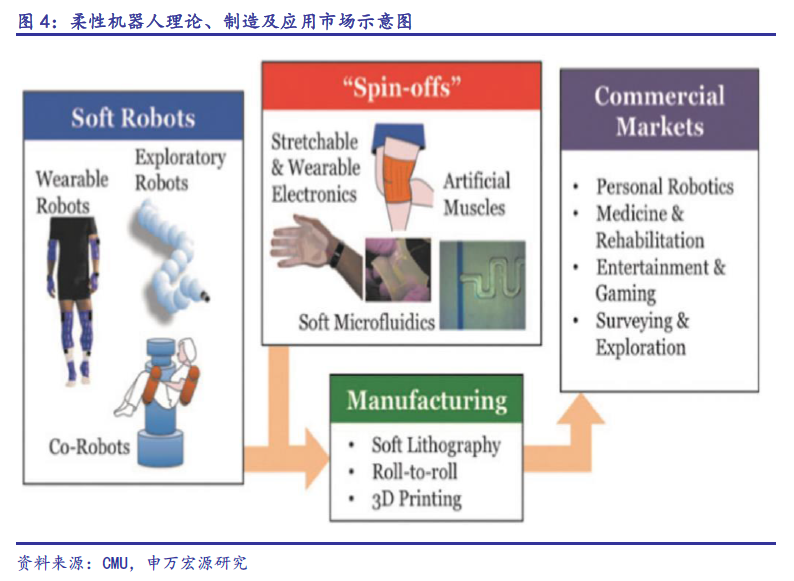
柔性機器人目前分為工業和生物兩大類,主要對應了制造業和醫療行業的需求。一般情況下,把柔性機器人分為兩類,一類是模擬生物的柔性與靈活性創造的仿生柔性機器人,另一類則是運用機器視覺的六軸以上工業機器人。兩類不完全獨立,只是第一種偏向于醫療,后一種更適用于制造業。柔性機器人主要由易變形的物質組成,如液體、凝膠和彈性體,它們與生物組織和器官的彈性和流變特性相匹配。這一新興的彈性柔軟、多功能和生物激發的機器代表了一種令人興奮的、高度跨學科的工程范式,它將徹底改變機器人在醫療保健、野外探索和合作人類互助中的作用。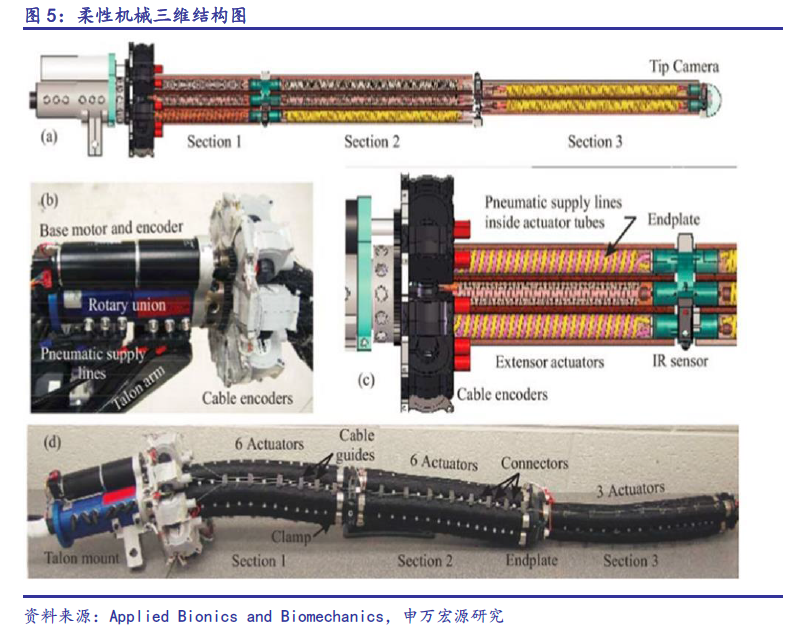
工業級柔性機器人更多的是指機器感知與傳統工業機器人結合的高智能化機器人。工業級柔性機器人(soft robot)更多的指的是運用機器視覺定位系統,通過機器視覺產品(即圖像攝取裝置,分CMOS 和CCD 兩種)將被攝取目標轉換成圖像信號,傳送給專用的圖像處理系統,得到被攝目標的形態信息,根據像素分布和亮度、顏色等信息,轉變成數字化信號;圖像系統對這些信號進行各種運算來抽取目標的特征,進而根據判別的結果來控制現場的設備動作。
機器感知、機器行動與人機交互是柔性機器人的三大組成部分。首先從仿生學來看,柔性機器人設計初衷在于能在各種復雜環境中代替甚至做到人類所不能,它們需要與軟材料、生物或人工復制的生物功能進行交互。柔性機器人一般由機器感知、機器行動和人機交互三部分組成。機器感知中一般采用的材料都是楊氏模量1大于109Pa,而像皮膚、肌肉等結締組織的楊氏模量為102~106Pa。機器行動依靠的是每一個活動關節處裝有的驅動器(actuator)。并不是所有的柔性機器人都具有人機交互功能,這一功能一般靠深度學習和自然語言處理(NLP)完成。

