工業自動化的根本目標是提升全要素生產率,現階段的主要方式是通過替代人力解決效率提升的瓶頸。工業自動化可以為生產者實現全要素生產率的持續提升,帶來經濟效益,而在現階段的工業自動化生產環境中,生產者主要通過自動控制裝置及自動執行機構以協調各工序設備,實現機器自動化生產,從而打破人力生產效率瓶頸,實現自動化革新目的。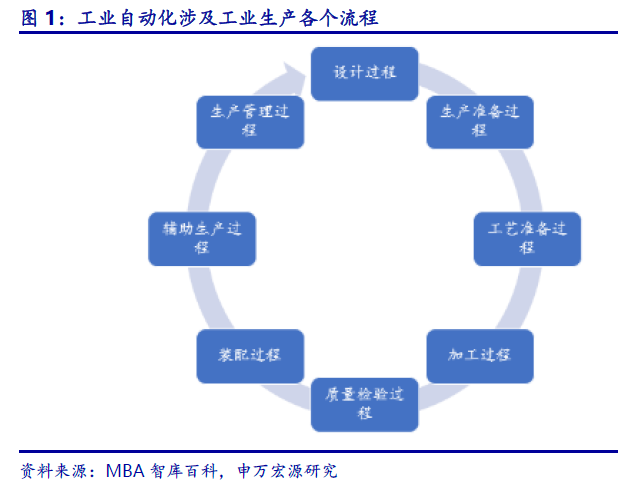
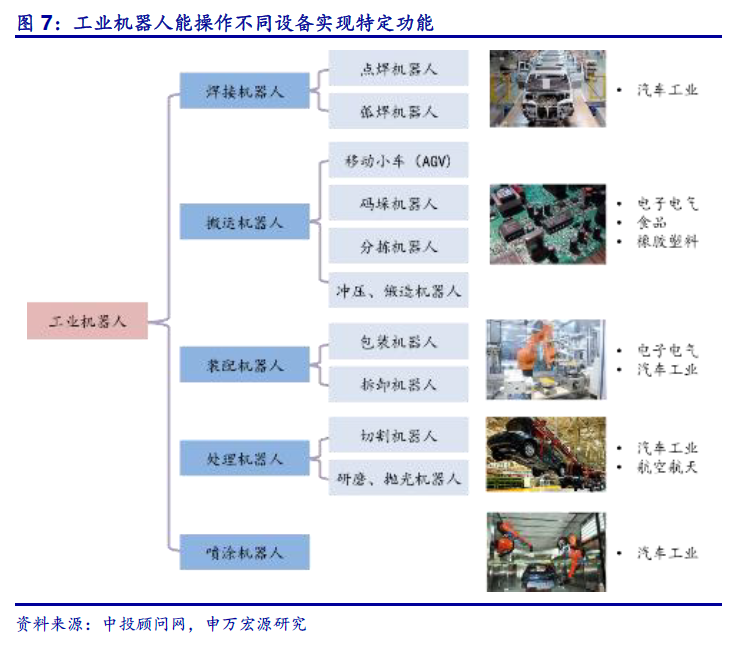
高度自動化:汽車、半導體生產自動化程度高,由不同自動化的工藝流程組成。以汽車工業為例,汽車的生產主要包括沖壓、焊接、涂裝及總裝四大部分流程。當前,汽車生產線已基本實現全自動化生產,工業控制設備及以焊接機器人、噴涂機器人、處理機器人為代表的自動執行設備被廣泛應用于汽車生產線各工藝流程,代替人力操作實現高效自動化生產。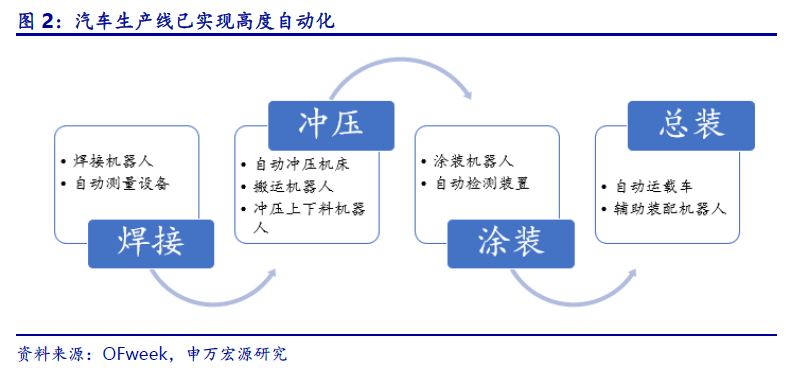
部分自動化:現階段工廠的主要組織形式,由人與延伸人的能力的設備組成。相比于高度自動化的汽車、半導體產業, 3C 組裝、服裝加工等大部分工業生產還處在部分自動化階段。以服裝加工為例,自動開袋機、自動釘扣機、自動拉布機、服裝吊掛系統等自動化設備可以輔助人力進行服裝生產加工操作,相比于純手工生產,自動化設備的輔助可以提高生產效率,減少勞動力成本,而未來進一步提升自動化水平是該類企業的必然選擇。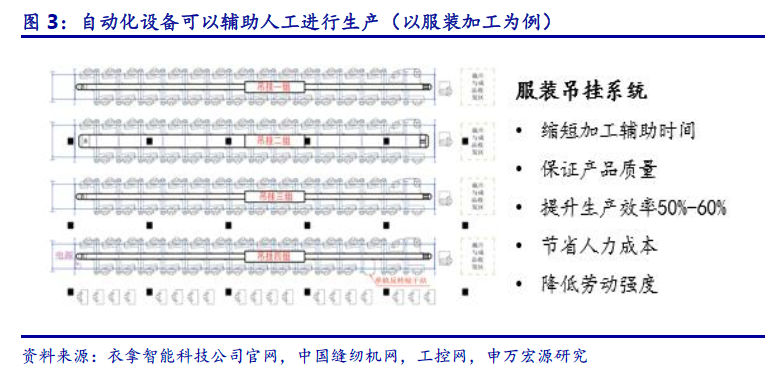
自動化的實現路徑是通過機器替代人力動作,低自由度的設備只能部分替代人類動作。在自動化生產中,機器換人的要求是使機器能模仿人的肢體動作進行生產,其中,機器設備的自由度是衡量機器模仿能力的重要指標。人臂有七個自由度,能實現多方向位移及多軸旋轉,從而進行復雜的加工操作,而低自由度的機械設備,例如傳送帶、電動螺絲刀、單軸機械手、叉車等,只能實現單方向位移或旋轉,無法完全替代人工,只能作為輔助工具使用。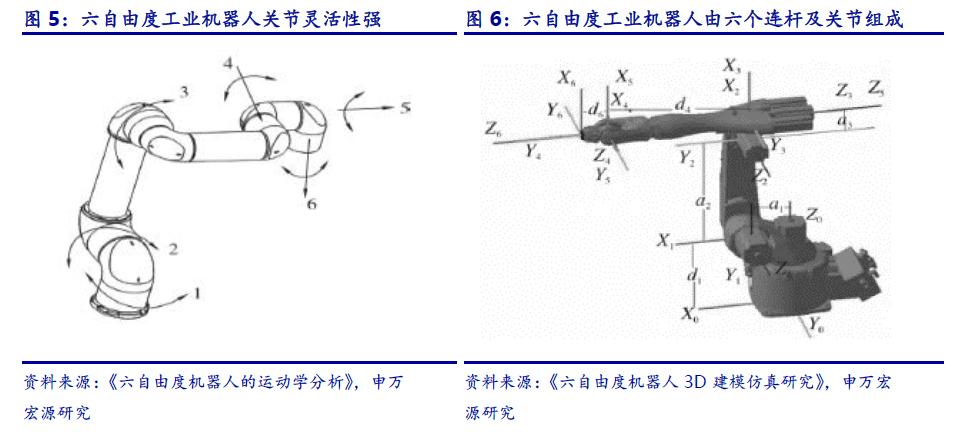
六軸工業機器人可以實現多自由度的運動,模擬人類實現物體轉動與位移。機器人的自由度由其可沿軸的直線移動、擺動或旋轉動作的數目表示,自由度越多就越接近人手的動作機能,通用性就越好。目前在工業領域中以六軸機器人應用最為廣泛。六軸機器人與人類手臂極為相似,它可以拿起一個對象,并移動將其放置在空間特定位置,同時還可以任意改變對象位姿狀態,進行偏航、俯仰和橫滾操作。