單車 ECU 數量激增,無法滿足汽車智能化的需求。1980 年代開始,以機械為主宰的汽車行業內掀起一場電子電氣化革命,電子控制單元(Electronic ControlUnit,ECU)占領了整個汽車,此時的汽車電子電氣架構都是分布式的,各個ECU 都通過 CAN(Controller Area Network,控制器域網絡)或 LIN(LocalInterconnect Network,局部互聯網絡)總線連接在一起,通過工程師預設好的通信協議交換信息。在傳統的 EEA 架構下,ECU 是系統的核心,智能功能的升級依賴于 ECU 數量的累加。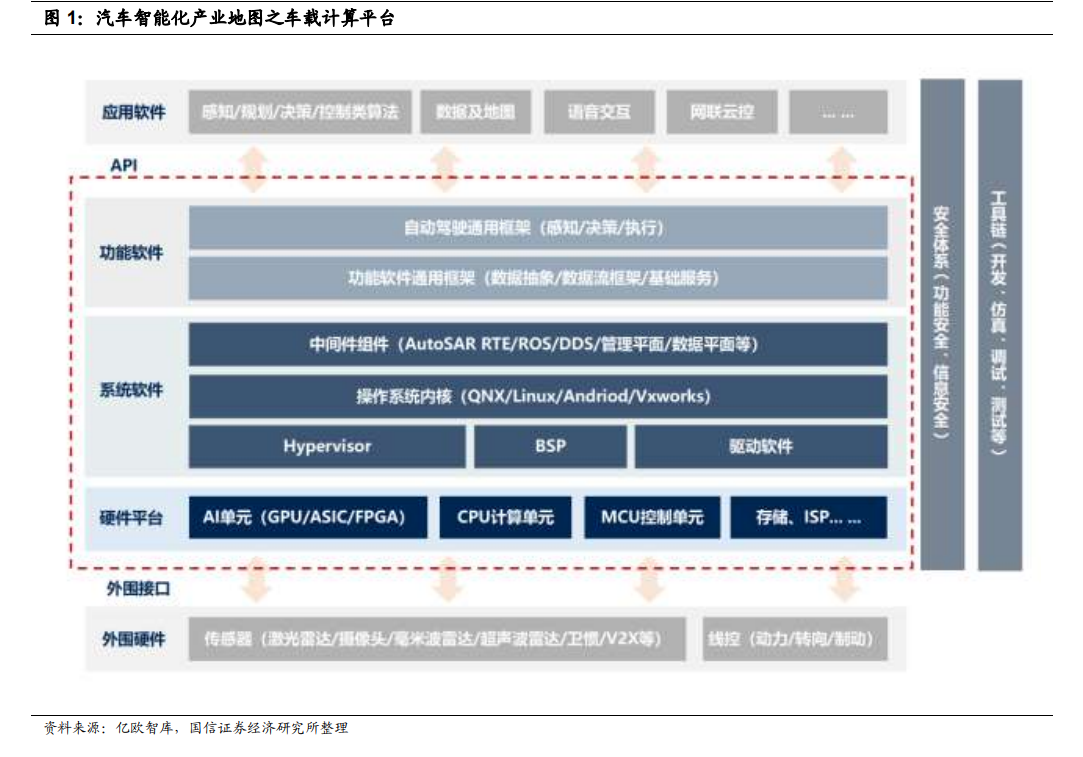
原有智能化升級方式面臨研發和生產成本劇增、安全性降低、算力不足等問題,傳統分布式架構亟需升級,傳統 EEA 架構主要面臨以下問題:(1)控制器數量過多:各級別汽車 ECU 數量都在逐年遞增,每臺汽車搭載的 ECU 平均 25個,一些高端車型通常會超過 100 個;(2)線束布置過于復雜:ECU 數量越多,總線數量必將更長,2000 年奔馳 S 級轎車的電子系統已經擁有 80 個 ECU,1,900 條總長達 4km 的通信總線。2007 年奧迪 Q7 和保時捷卡宴的總線長度突破 6km,重量超過 70kg,基本成為位列發動機之后的全車第二重部件;(3)“跨域”信號傳輸需求增加:智能駕駛需要大量的“跨域”信號傳輸,環境傳感器(雷達,視頻和激光雷達)產生了大量數據傳輸的需求,這也對傳統分散式 ECU 基礎架構提出了挑戰。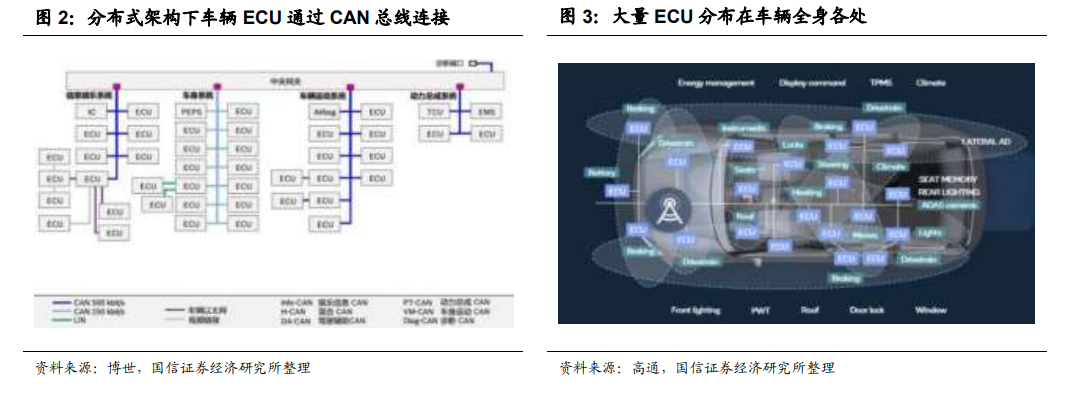
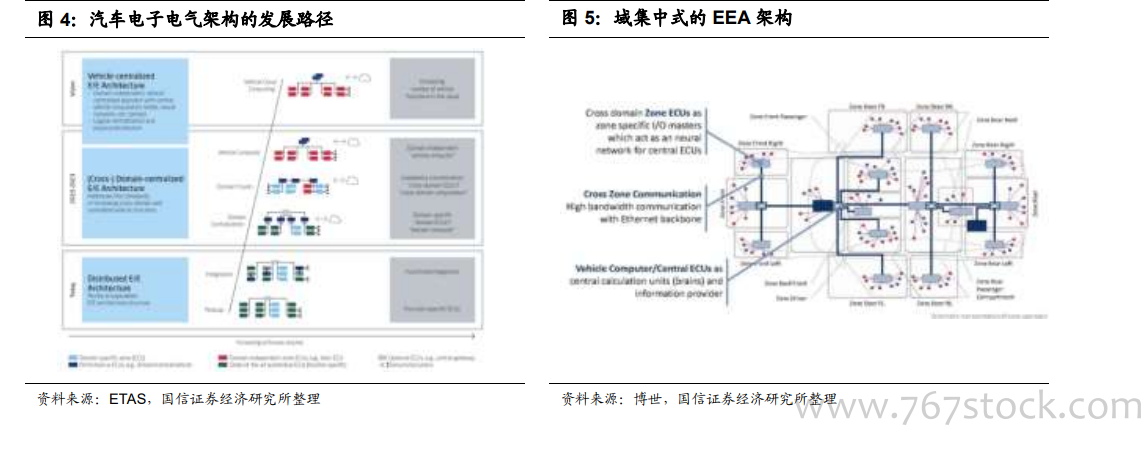
為適應智能化需求,催生出以 DCU 為主的域集中架構。為了控制總線長度、降低 ECU 數量,從而降低電子部件重量、降低整車制造成本,將分散的控制器按照功能域劃分、集成為運算能力更強的域控制器(Domain Control Unit,DCU)的想法應運而生。博世用三類 EEA 架構共六個階段來展示架構演進方向:分布式(模塊化、集成化)、域集中式(集中化、域融合)、集中式(車載電腦、車-云計算)。