激光的發明要追溯到愛因斯坦在 1917 年創立的受激輻射基礎理論。處在高能級的粒子受到某種光子的激發會從高能級躍遷到低能級,同時釋放一個與激勵光子有著完全相同的頻率、相位、傳播方向以及偏振狀態的光子,受激發射出的光被稱為 LASER,最早被翻譯為鐳射,如今我們翻譯為激光。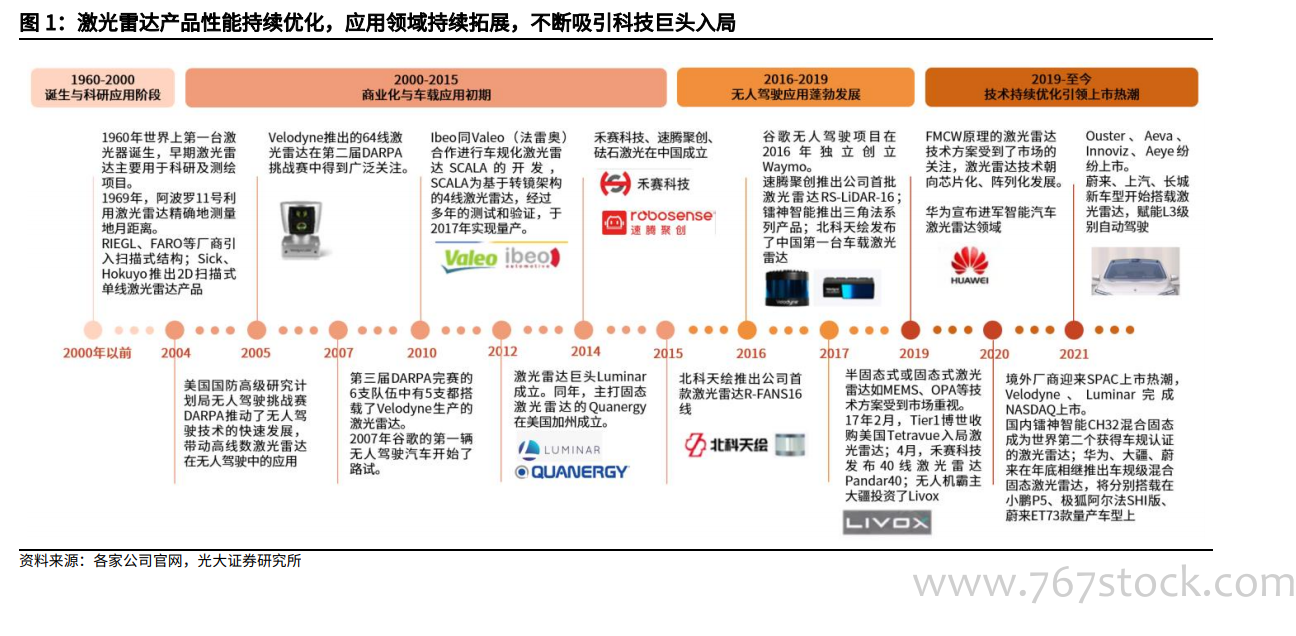
智能駕駛分為感知、決策、控制三大核心環節。要想實現智能駕駛,第一步就是讓車看清楚周圍的環境,也就是“感知”。進一步拆解可以分成兩部分,一個是硬件部分,負責“看到”,即“感”;另一部分是軟件部分,也就是算法,負責“理解”,即“知”。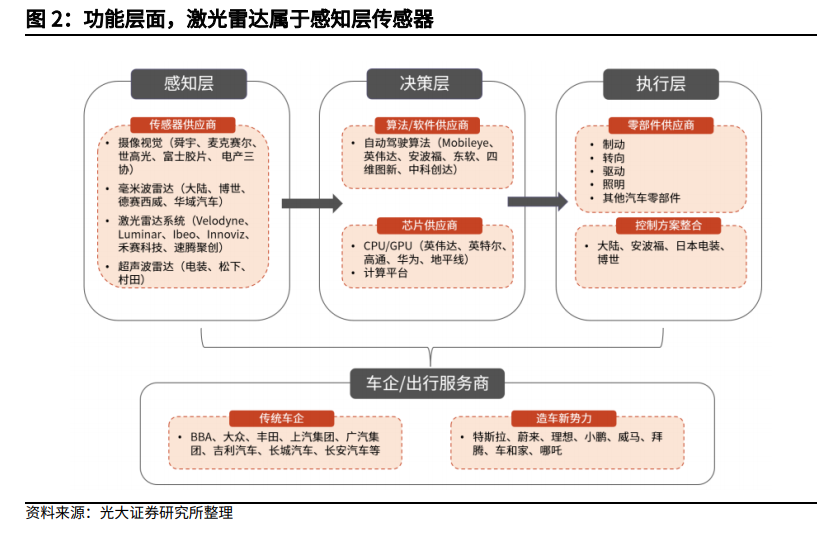
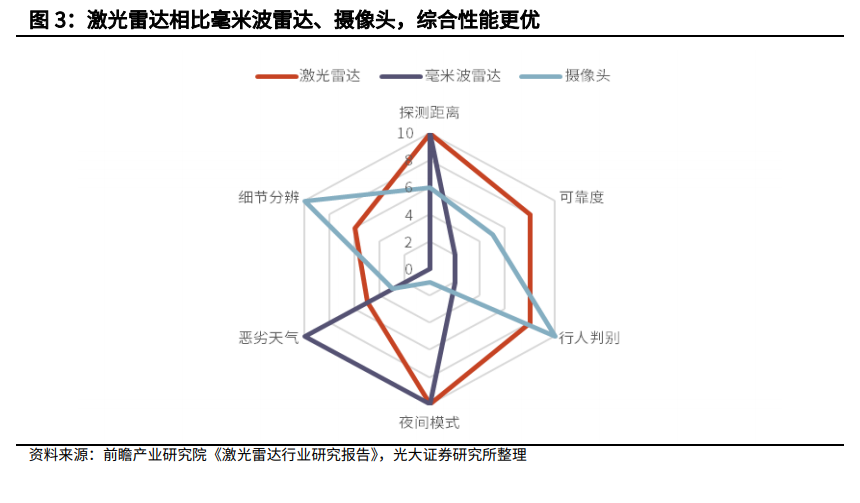
激光雷達位于感知層,不同傳感方式的原理和功能各不相同,在車載領域各有優劣。目前主要的感知方式包括但不限于:超聲波雷達、C-V2X、高精度地圖、攝像頭、毫米波雷達、激光雷達等。