激光雷達按照測距方法可以分為飛行時間(Time of Flight,ToF)測距法、基于相干探測的 FMCW 測距法、以及三角測距法等。其中 ToF 與 FMCW 能夠實現室外陽光下較遠的測程(100~250m),是車載激光雷達的優選方案。ToF 是目前市場車載中長距激光雷達的主流方案,未來隨著 FMCW 激光雷達整機和上游產業鏈的成熟,ToF 和FMCW 激光雷達將在市場上并存。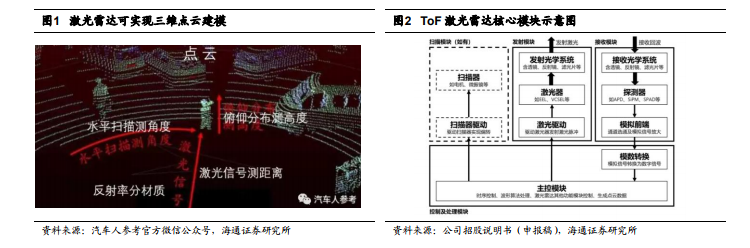
激光雷達緊跟底層器件的前沿發展,技術水平要求高。從激光器發明之初的單點激光雷達到后來的單線掃描激光雷達,以及在無人駕駛技術中獲得廣泛認可的多線掃描激光雷達,再到技術方案不斷創新的固態式激光雷達、FMCW 激光雷達,以及如今芯片化的發展趨勢,激光雷達一直以來都是新興技術發展及應用的代表。從激光雷達技術方案來看,新技術的具體體現如下表所示: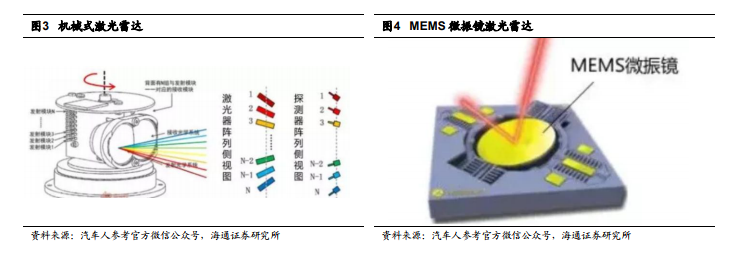
L4/L5 級別無人駕駛通常以 360°機械旋轉式激光雷達作為主傳感器。激光雷達是L4/L5 級別無人駕駛技術的核心傳感器,國內外眾多無人駕駛科技公司均采用激光雷達輸出的點云數據作為主要決策依據。360°機械旋轉式激光雷達作為主傳感器,一般被放在無人駕駛出租車或無人駕駛卡車的車頂,且一臺車上通常會配臵多臺激光雷達,或覆蓋車身兩側或長距短距兼顧,用以滿足復雜道路場景的探測需求。