機器人液壓驅動方式。液壓驅動系統的工作原理是以壓縮機油來驅動執行機構進行工作,包括液動機(各種油缸、油馬達)、伺服閥、油系、油箱等基本組成部分。液壓驅動的輸出力和功率很大,能構成伺服機構,常用于大型機器人關節的驅動,大多用于要求輸出力較大的場合。液壓驅動系統主要由液壓缸和液壓閥等組成。液壓缸結構簡單、工作可靠,是液壓驅動系統的主要執行元件,可以將液壓能轉變為機械能、做直線往復運動或擺動運動。用液壓缸來實現往復運動時,可免去減速裝置,且沒有傳動間隙,運動平穩,因此在各種液壓系統中得到廣泛應用。
機器人氣壓驅動方式。氣壓驅動的工作原理基本上是以氣體為工作介質,彈性腔體在氣壓和結構約束的作用下,在一定的空間維度上產生各種形式的運動。彈性腔體通常采用易于拉伸彈性材料,或者不可拉伸但易于折疊的薄殼或薄膜結構。根據其不同的形式特點,可以分為以下幾種驅動器。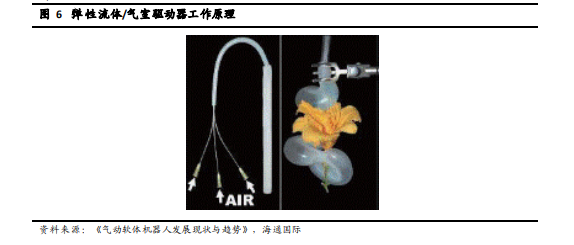
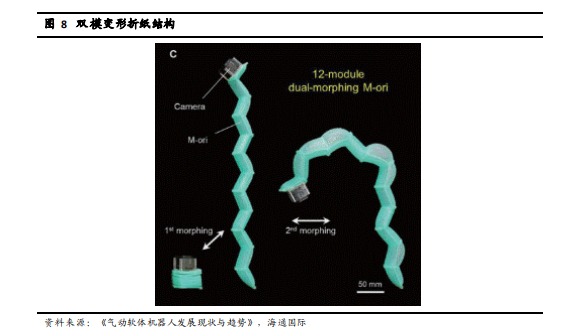
正壓展開軟體驅動器。正壓驅動的折疊/褶皺氣動軟體驅動器的柔性氣室,通常可以被折疊或壓縮。當驅動器內部空氣壓力增大時,柔性氣腔可以膨脹。這種結構主要的形式是流體折紙結構,它可以形成管狀內腔,利用折疊參數與內部流體體積變化之間的復雜關系,同時實現變形和剛度的優化。此外,還有衍生的雙模變形折紙結構。