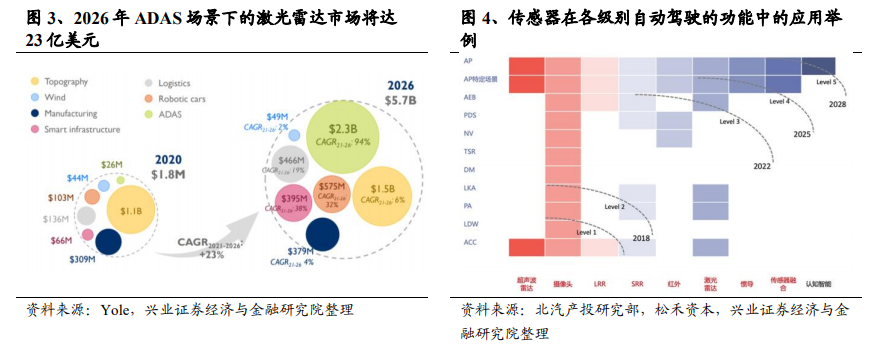
汽車智能化大趨勢推動高階自動駕駛發展,未來完全自動駕駛有望成為高端標配。在三電部分逐漸標準化的當下,汽車 OEM 需要打出新的宣傳點以實現產品差異化宣傳,其中高級別自動駕駛功能的落地已經成為整車廠研發的重中之重。在自動駕駛領域實現跨越式領先的車企有望以此搶占更大的市場份額,行業領先格局也很可能因此發生洗牌。考慮到從輔助駕駛向完全自動駕駛的轉變對于軟硬件的要求截然不同,L3 及以上自動駕駛對于傳感器等核心零部件的技術要求及搭載數量要求遠超輔助駕駛所需,因此激光雷達有望在規模效應的驅動下實現量升價降的上升發展趨勢,當下激光雷達性能優異但價格高昂的問題也將迎刃而解。
高階自動駕駛落地需要解決“全場景”安全駕駛問題,激光雷達是保證高階自動駕駛安全性的必備冗余。自動駕駛路線之爭還在持續,目前以特斯拉代表的純視覺路線在探測距離、精度、算法局限性(難以解決長尾效應)等方面存在先天缺陷,其對于在“未知場景”的判斷差強人意,行業對于純視覺方案能否最終走通存在爭議。安全性成為高階自動駕駛功能落地前車企最急需解決的問題,通過在罕見或未知場景下提供更多有效信息以輔助決策的方式,激光雷達已然成為提高現有“攝像頭+毫米波雷達+超聲波雷達”方案安全性的關鍵。伴隨激光雷達供應成本的不斷下探,搭載前置激光雷達的多傳感器融合方案有望成為主流車企的最優自動駕駛解決方案。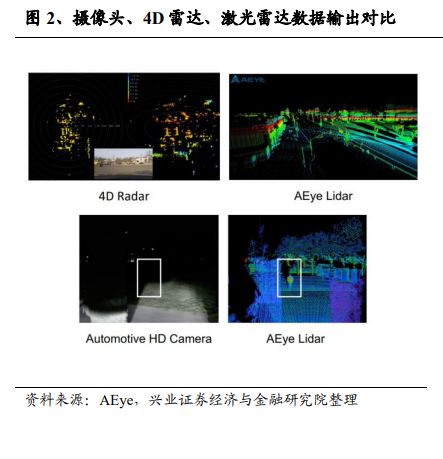
特斯拉純視覺方案先發優勢明顯,其他車企有望借助融合方案實現彎道超車。成熟的純視覺方案需要極大的訓練數據庫及大量專業人員以開發可靠算法,而特斯拉由于較早步入自動駕駛領域,其海量量產車型為特斯拉提供龐大的真實用戶行駛數據,憑借北美地區優秀的半導體行業土壤,特斯拉在攝像頭融合、圖像處理、自動駕駛算法、自動駕駛硬件設計等領域有著其他車企幾乎無法超越的先發優勢。如此現狀下,大多數車企為在自動駕駛領域實現彎道超車,均采用多傳感器融合方案,激光雷達的需求應運而生。與此同時,非特斯拉車企在軟硬件融合方面的劣勢也可以通過采購外部成熟方案的方式避免。整車廠一是可以通過采購英偉達自動駕駛平臺以實現更高算力水平,二是可以采用激光雷達整機廠提供的感知配套軟件。激光雷達正在成為高階自動駕駛的核心零部件。