整個車載感知系統主要包括環境感知、車身感知與網聯感知三大部分。其中,(1)環境感知:主要負責車輛從外界獲取信息,如附近車輛、車道線、行人、建筑物、障礙物、交通標志、信號燈等,主要包括四大類別的硬件傳感器車載攝像頭、毫米波雷達、激光雷達、超聲波雷達;(2)車身感知:主要負責車輛對自身狀態的感知,如車輛位置、行駛速度、姿態方位等,主要包括慣性導航、衛星導航和高精度地圖;(3)網聯感知:主要負責實現車輛與外界的網聯通信以此來獲得道路信息、行人信息等,主要包括各類路側設備、車載終端以及 V2X云平臺等。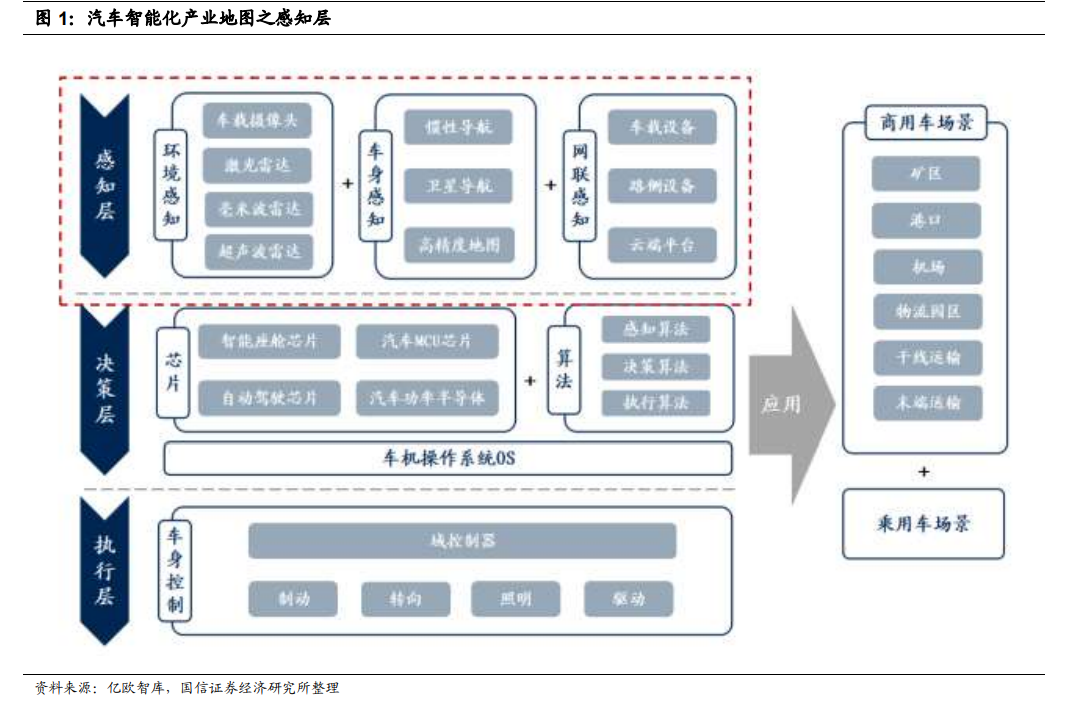
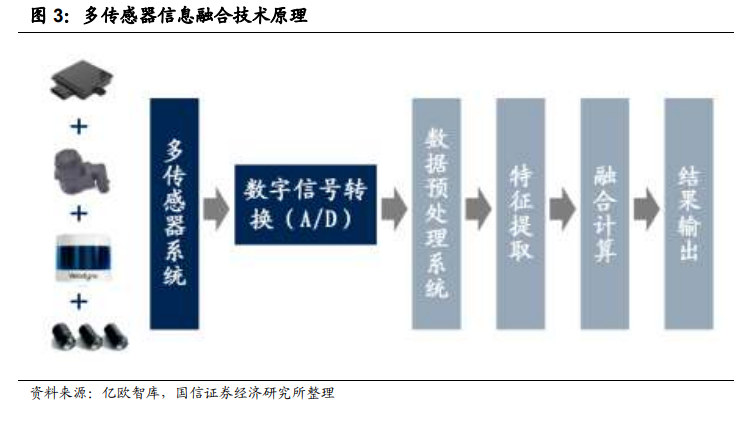
四大硬件傳感器是自動駕駛汽車的眼睛,是環境感知的關鍵。車載傳感器主要包括車載攝像頭、毫米波雷達、激光雷達、超聲波雷達四大類。自動駕駛汽車首先是對環境信息與車內信息的采集、處理與分析,這是實現車輛自主駕駛的基礎和前提。環境感知是自動駕駛車輛與外界環境信息交互的關鍵,車輛通過硬件傳感器獲取周圍的環境信息,環境感知是一個復雜的系統,需要多種傳感器實時獲取信息,各類硬件傳感器是自動駕駛汽車的眼睛。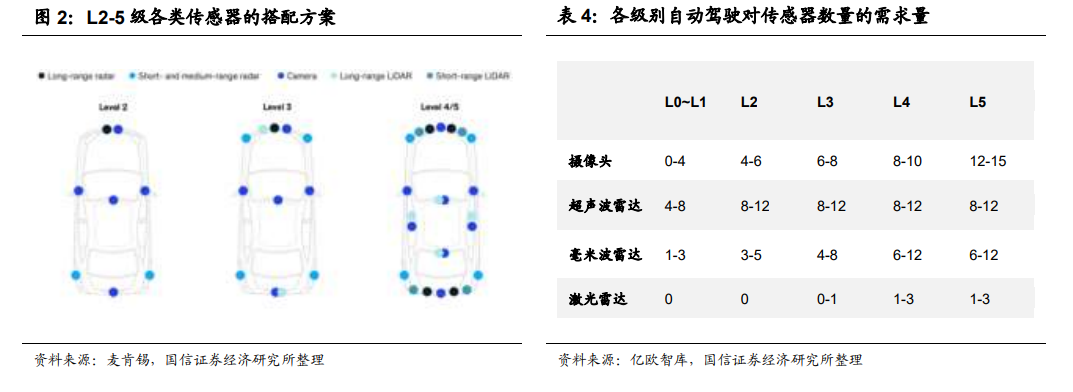
當前自動駕駛正處在 L2 向 L3 級別跨越發展的關鍵階段。其中,L2 級的 ADAS是實現高等級自動駕駛的基礎,從全球各車企自動駕駛量產時間表來看,L3 級別自動駕駛即將迎來大規模地商業化落地。