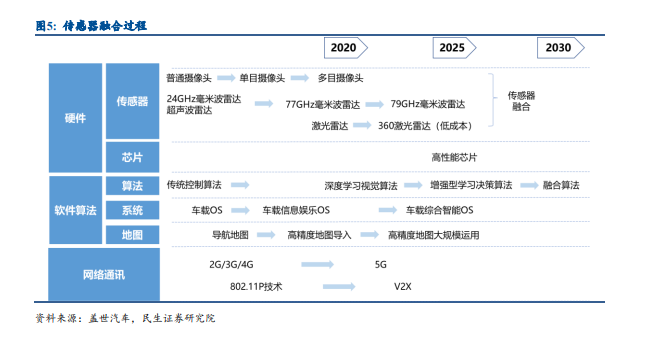
多傳感器配置保證系統冗余:根據工信部《汽車駕駛自動化分級》,可將自動駕駛分為L0-L5 六個等級。在等級要求上:L0-L1 駕駛員參與對車輛橫向和縱向控制,L0-L2 駕駛員完成目標和事件探測與響應。到了 L3 階段,在特定駕駛模式下由自動駕駛系統完成所有的動態駕駛任務,但期望人類駕駛員能正確響應請求并接管操控。在功能實現上:L1 主要實現自適應巡航、自動緊急剎車、車道保持、泊車輔助等功能,L2 能完成車道內自動駕駛、換道輔助和自動泊車;而 L3 可以進行有條件的自動駕駛如高速自動駕駛,城郊公路駕駛等;L4-L5 最終實現車路協同,達到城市內自動駕駛。在硬件配置要求上:自動駕駛程度的遞進,需要多傳感器的融合,對攝像頭、超聲波雷達、毫米波雷達、激光雷達等感知層硬件的性能和數量提出更高的要求。
多傳感器融合的感知系統可以形成互補,有效應對現實世界中的光照,天氣,路況各種復雜條件,以及再安全方面形成冗余設計。激光雷達對于距離的探測很強,也具備一定的全天候工作能力,在 3D 成像和高精度地圖定位方面具備優勢。攝像頭的采樣率和分辨率很高,對于紋理信息獲取能力強,但是受到天氣的影響太大。相比于攝像頭和激光雷達,毫米波雷達的優勢在于全天候工作特性,受不良天氣影響弱,測速、測距能力強。超聲波雷達主要適用于近距離感知,具備成本低車規級量產容易等優勢。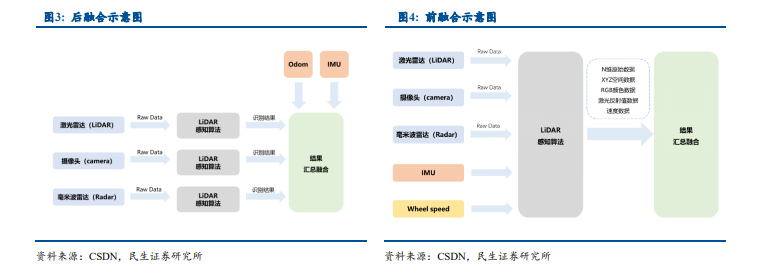
前融合是未來趨勢,最終實現軟硬件解耦。傳感器融合分成兩種:前融合和后融合。后融合算法下,每個傳感器各自獨立處理生成目標數據,再由主處理器進行數據融合。而前融合只有一個感知算法,在原始層把各種傳感器的數據融合在一起,實現原始數據的同步,即空間同步和時間同步。相較于后融合,前融合的優勢在于:1)前融合將所有傳感器的原始數據進行統一算法處理,降低了整個感知架構的復雜度和系統延遲;2)許多后融合感知中被過濾掉的無效和無用的信息,在前感知路線中通過與其他傳感器數據融合后進行綜合識別,可以創建出一個更全面、更完整的環境感知信息,大大提高感知系統的穩健性。