應用成熟度象限。高等級自動駕駛是車聯網的終極應用,然而絕非一蹴而就,而是需要眾多細分的應用持續積累突破,逐步提升行駛安全性和效率,才能盡可能接近最終的完全自動駕駛狀態。每個細分的應用,都是行駛過程中常見的場景,每個場景都有造成交通事故的可能性。每解決一個場景的問題,行駛的安全性就能有所提升,而這一點一滴的提升,則是逐步強化產業界和用戶對自動駕駛信心的基石。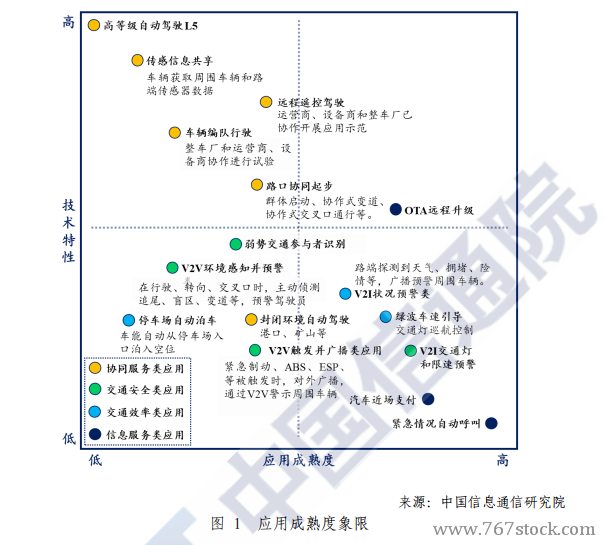
自動代客泊車。對大眾消費者來說,在家和公司以外的場所停車一直是很大的難題。自動代客泊車(Automated Valet Parking, AVP)則是針對大眾停車難、以及停車場管理等諸多痛點問題而設計實現的應用場景,當前主要方向包括車端解決方案和車場協同解決方案。車端解決方案,利用車載視覺或激光雷達等,通過低速自動駕駛技術,實現在限定區域(園區、地上停車場及地下停車場等場景)的自主代客泊車功能;車場協同解決方案,則是依靠智能型停車場基礎設施與車輛間的互聯(V2I),安裝在停車場內的傳感器引導車輛行駛到車位,并在這一過程中監控車輛的行駛路徑和周圍環境,車輛則需要能夠安全地把停車場基礎設施發出的指令轉化為駕駛操作指令,并在必要時及時制動汽車,參考架構示意如圖 2 所示。相比較,車場協同解決方案的優點是對車輛的感知和智能化程度要求不高,只需要電子制動、自動換擋、電子助力轉向及遠程互聯等基本功能;缺點則是對停車場的改造成本較高,在戴姆勒與博世公司共同研發場端 AVP 系統方案中,每 3 個車位需要設置 25 個單線激光雷達,所有路口均需設置監控攝像頭,且停車場內必須覆蓋超低延遲的網絡。2019 年 7 月,戴姆勒與博世公司在德國的 AVP 測試項目,正式獲得了斯圖加特與巴登-符騰堡州政府的特殊許可,將在梅賽德斯-奔馳博物館停車場投入使用。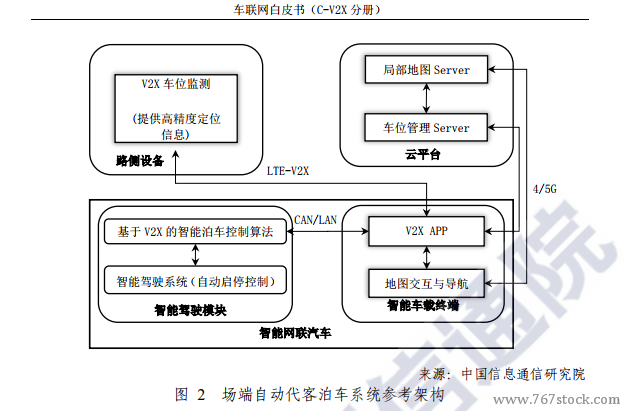
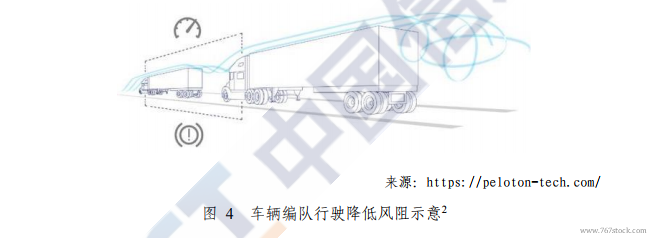
高速公路車輛編隊行駛。高速公路場景下的車輛編隊行駛可以降低空氣阻力省油。當前后車距接近時,兩車之間形成氣流真空區,不會產生氣流渦流,能降低空氣阻力,示意如圖 4 所示。根據北美貨運效率委員會數據,能至少節省 10%的油耗。不僅如此,車輛編隊行駛還能有效降低勞動強度。長途貨運卡車通常需要 2 名司機輪流駕駛,通過車輛編隊行駛,只有頭車需要司機專心駕駛,跟隨車輛幾乎不需要人類駕駛員接管,給司機提供更多休息時間,車隊司機人數也可適當減少。