智能駕駛按技術架構分為感知、決策和執行三個層次。感知層是汽車的“眼睛”,主要負責對環境信息和車內信息的采集與處理;決策層是汽車的“大腦”,依據感知信息來進行駕駛決策判斷;執行層相當于汽車的“四肢”,按照決策結果對車輛進行控制。這其中,感知層是實現智能駕駛的基礎和前提,在信息傳輸上歸納為三個層面:1、物理信息,包括姿態、速度、形狀、溫度、能耗等;2、語義信息,辨別物體的類別;3、行為預測,預測物體的行為。
智能傳感器是感知層的硬件核心。感知層通過傳感器實現對信息的感知,根據作用機理不同分為傳統傳感器和智能傳感器,前者主要負責車輛對自身狀態的感知,安裝在動力總成、底盤系統等汽車關鍵部位,該類傳感器多以 MEMS 工藝生產,具有低成本、高可靠性、小體積等優勢。后者負責從車輛外界獲取信息,是智能駕駛感知層的硬件核心,主要包括車載攝像頭、毫米波雷達、激光雷達、超聲波雷達四大類別的硬件傳感,具備兩個顯著特征:1)量少價高,與傳統傳感器相比,智能傳感器數量少且價格高,基本都在百元以上,占據了汽車傳感器總成本的絕大部分;2)量隨級升,隨著汽車 SAE 等級提升,為了提高感知冗余,所需配備的智能傳感器數量隨之增多。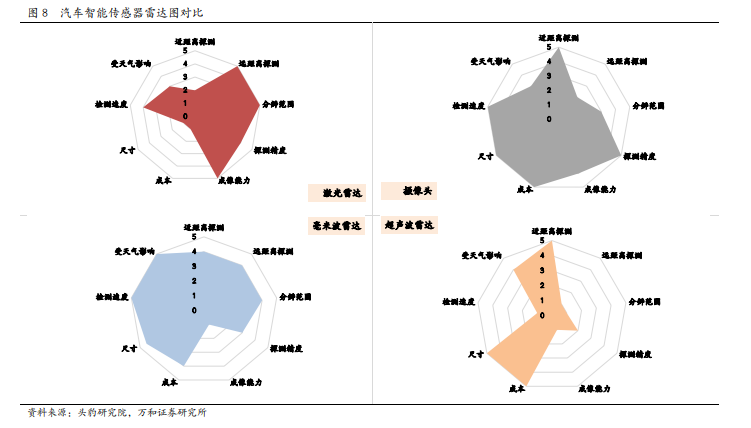
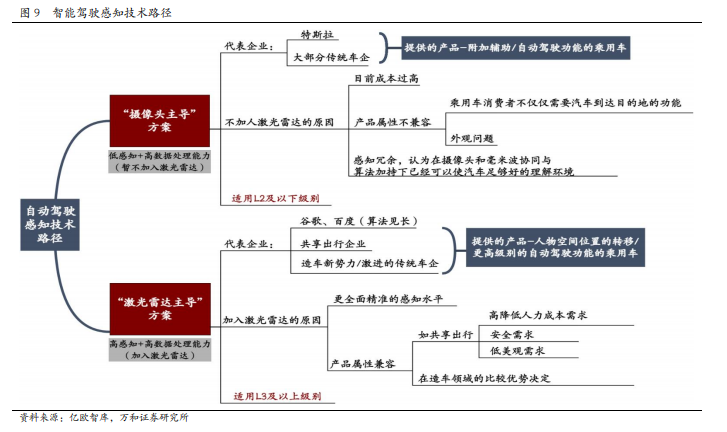
“激光雷達主導”方案增強感知系統冗余,助力 L3+智能駕駛的實現。“激光雷達”方案重感知重算法,精度高、抗干擾能力強,配合高精度地圖更能實現精準定位。隨著智能駕駛向 L3 進階,駕駛員的參與度會大幅度減少,單純的“眼見為實”已不再滿足車輛智能駕駛的需求。激光雷達具備高精度、高可靠性,配合攝像頭和毫米波雷達,能增強系統的可靠性、冗余性,有望在 L3+階段成為汽車傳感器中不可或缺的一部分,并且借助差異化競爭優勢,也有望成為除特斯拉外的造車新勢力實現彎道超車的有效手段。