工業機器人:面向工業領域的多關節機械手或多自由度機器人。自動執行工作的機械裝臵,靠自身動力和控制能力來高精度地重復執行特定工作。體積較大,相對而言比較危險,一般被限制在特定的工作區域獨立工作。工業機器人產業鏈上游為三大核心零部件(減速器、伺服、控制器),中游為工業機器人(多關節機器人、SCARA 平面多關節機器人、delta 并聯機器人、直角坐標機器人等),下游系統集成應用領域(焊接、裝卸、裝配、噴涂、上下料等),主要服務汽車、電子、金屬、化學制品和食品等對自動化、智能化需求較高的終端行業。
人形機器人和服務機器人最大的區別在于人形機器人需要保持平衡。普通服務機器人有底盤,用輪式驅動,不存在摔倒問題,只需要按照設定軌跡移動,并能實現一定程度的爬坡即可;人形機器人比服務機器人高度更高,需要靠雙足行走,既要走得穩,還要走得快,并需要適應不同的地面。由于結構更接近人形,每個關節受力更加復雜,對減速器負載和電機響應速度要求更高。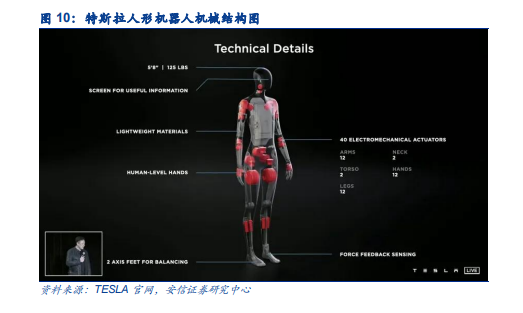
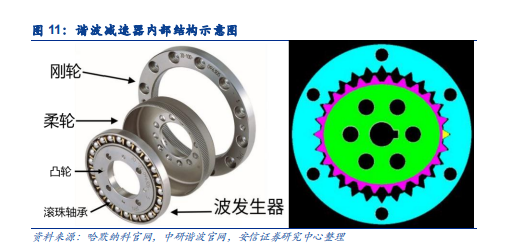
諧波減速器由波發生器、柔輪和剛輪三部分構成。①波發生器:圖示綠色橢圓形部分,中間是凸輪,外圈是滾珠軸承,其內圈固定在凸輪上,外圈通過滾珠發生彈性形變。②柔輪:圖示粉紅色部分,使用柔性金屬材料制成,外圈有齒。③剛輪:圖示青色部分,使用剛性材料制成,內圈有齒。三部分可任意固定一個,其余一個主動、一個從動,實現減速或增速;也可變換成兩個輸入,一個輸出,組成差動傳動。