分布式計算導致了車內信息孤島、算力浪費、軟硬件耦合深,主機廠嚴重依賴供應商。傳統汽車供應鏈中,不同的 ECU 來自不同供應商,不同的硬件有不同的嵌入式軟件和底層代碼,整車軟件實際上是很多獨立的、不兼容的軟件混合體,導致整個系統缺乏兼容性和擴展性。車廠要進行任何功能變更都需要和許多不同的供應商去協商軟硬件協調開發問題,每新增一個新功能都需要增加一套 ECU 和通信系統,耗時長,流程繁瑣。且由于每個 ECU 綁定一個具體功能,無法實現橫跨多個 ECU/傳感器的復雜功能,亦無法通過 OTA(Over-the-Air)來保持汽車軟件的持續更新。
分布式電子電氣架構導致通信帶寬瓶頸。智能網聯車功能越來越復雜,車輛傳感器數量增加,由此產生的數據傳輸及處理的實時性要求提高,汽車內部網絡通信數據量呈指數級增長趨勢,傳統的 FlexRay、LIN 和 CAN 低速總線已無法提供高帶寬通信能力,也無法適應數據傳輸及處理的實時性要求。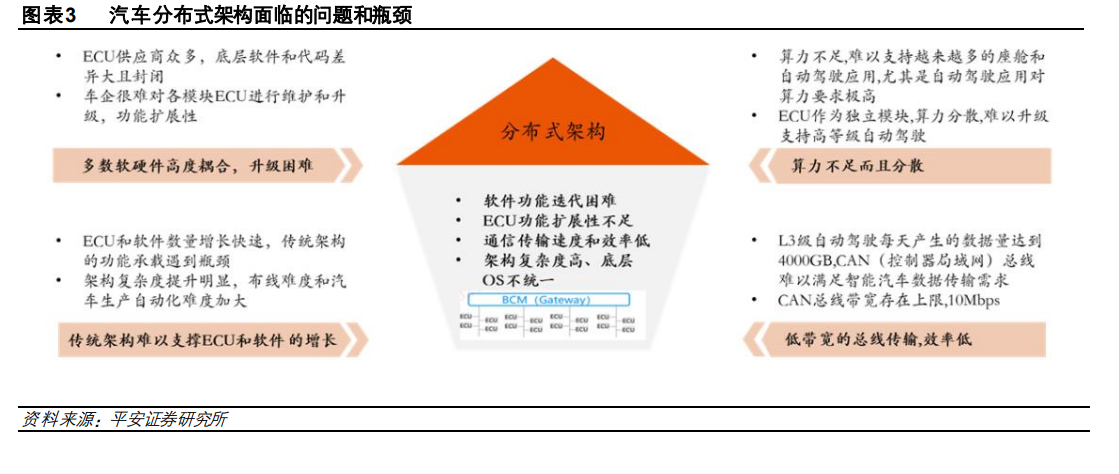
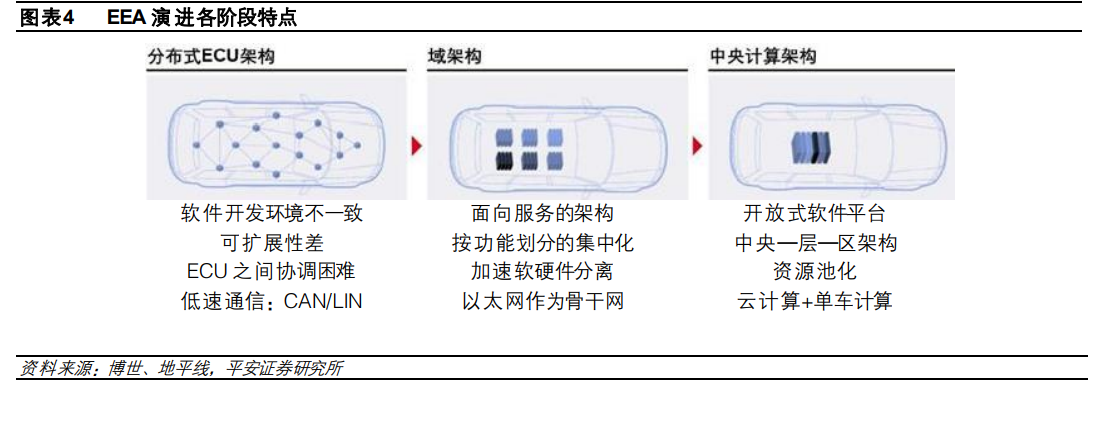
汽車分布式電子電氣架構已不能適應汽車智能化的進一步進化。高度集成是解決之道。基于少量高性能處理器打造汽車的“大腦”,通過一套新型的電子電氣架構,形成快速傳遞信息的“神經網絡”和“血管”,以控制和驅動所有電子件和傳感器。少量的高性能計算單元替代過去大量分布式 MCU(微控制單元),多個分散的小傳感器集成為功能更強的單個傳感器,汽車功能逐步整合集中,ECU的減負意味著把整車原先搭載的幾十上百個 ECU逐一進行軟硬件剝離,再把功能主要通過軟件遷移到域控制器(域控制器是指域主控硬件、操作系統、算法和應用軟件等幾部分組成的整個系統的統稱)中,如自動駕駛、娛樂、網關等,在域控制器架構的基礎上,更進一步把不同功能的域進行整合,就到了跨域融合階段,再進一步到中央計算+位置域階段。華為判斷到 2030 年電子電氣架構將演進為中央計算平臺+區域接入+大帶寬車載通信的計算和通信架構。