位置信息是自動駕駛車輛路徑規劃和車輛控制的基礎,是自動駕駛實現的關鍵要素 :對比有人駕駛系統,人通過眼睛和耳朵感知周邊環境,對比記憶做出決策,比如方向盤控制、加減速、變道、剎車等等;自動駕駛則通過車載雷達、 攝像頭、GNSS/IMU等傳感器搜集車輛位置信息,并以位置信息數據為基礎,根據高算力的計算中心獲取經過優化的駕駛決策,最后自動駕駛系統基于決策層給出的駕駛決策,對制動系統、發機轉向等控下達指令,負責駕駛執行。
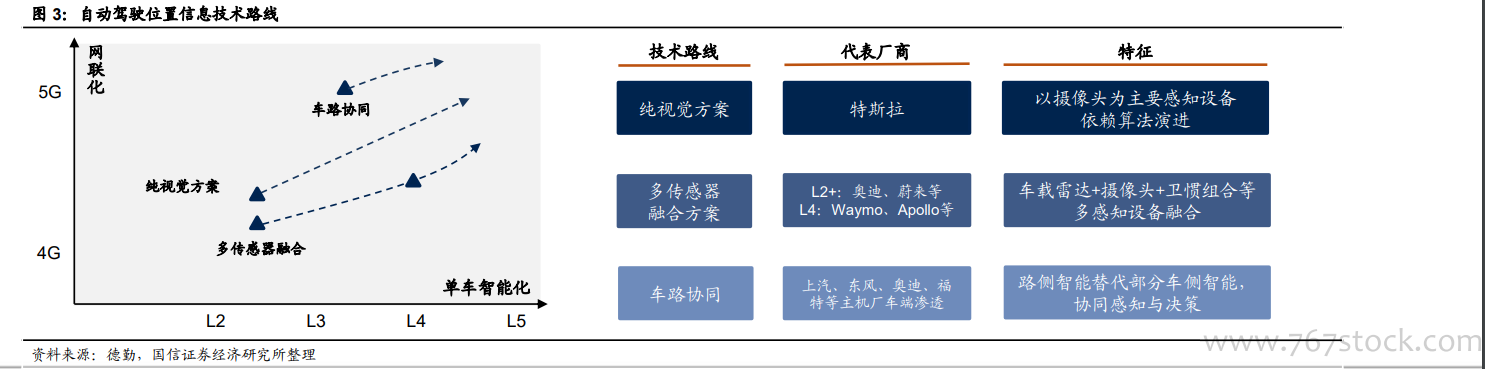
特斯拉純視覺方案,依賴算法演進:業內純視覺的自動駕駛方案以特斯拉為典型代表,目前特斯拉仍采用車載攝像頭為主+毫米波雷達為輔的傳感器配置,進一步在下一代自動駕駛套件V9上,特斯拉將移除雷達,完全采用全視覺方案。為了實現這一方案,特斯拉在深度學習算法上投入了相當大的力度,除開先前的影子模式訓練(截至2020年已完成超30億英里),進一步在特斯拉AI Day上,特斯拉公布了在神經網絡、數據&數據標注、仿真等層面的持續創新,在Autopilot上進一步優化延遲問題的神經網絡編輯器等改進,并發布Dojo用于在數據中心訓練神經網絡。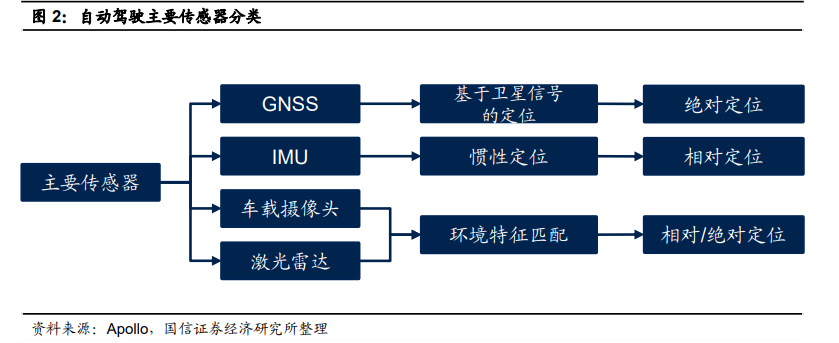
與視覺方案相比,多傳感器融合的核心區別之一是激光雷達的應用。Waymo自動駕駛的單車智能技術主要以多種感知硬件設備(激光雷達為主+毫米波雷達+攝像頭)、高精地圖和軟件算法等組成。事實上,圍繞激光雷達的應用與否成為特斯拉純視覺路線和多傳感器融合路線的分歧焦點。隨著激光雷達的技術、成本等不斷優化,2021年以來越來越多的車型開始采用激光雷達,或作為多傳感器融合路線的主要感知設備(如谷歌Waymo),或作為硬件冗余的一部分(如小鵬P5等)。