
3D 感測滲透加速,主流手機廠商加入 TOF 陣營。3D 感測技術路線很多,不同技術的性能不同,適合的應用領域也不同。在消費電子應用領域,目前主流的 3D 感測技術有兩種:3D 結構光(3D StructureLight)和時間飛行法(TOF, Time of Flight)。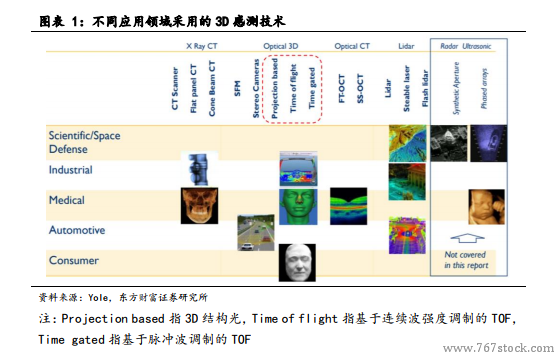
3D 結構光方案的原理是采用紅外光源,發射出來的光經過一定的編碼投影在物體上,這些圖案經物體表面反射回來時,隨著物體距離的不同會發生不同的形變,圖像傳感器將形變后的圖案拍下來。基于三角定位法,可以通過計算拍下來的圖案里的每個像素的變形量,來得到對應的視差,從而進一步得到深度值。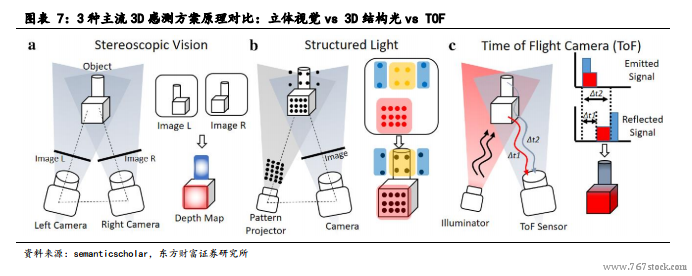
TOF 方案的測量精度低也是由其測量原理決定的,前面提過可以通過提高CMOS 傳感器性能來改善,但會帶來成本的提高。TOF 方案的測量精度是由測量距離和接收端傳感器的分辨率及視場角決定。在測量距離和視場角一定的條件下,傳感器分辨率越高,則測量精度越大。目前在人臉識別應用商,業內一般要求至少達到 VGA 分辨率(即 30 萬像素),因此華為和三星也將 TOF 用在前置攝像頭,但安全性還是低于 3D 結構光方案。vivo 發布NEX 雙屏版時宣稱具備 30 萬個點的深度信息,而 iPhone X 的 3D 結構光只有 3 萬個,因此深度信息是其 10 倍。這其實是概念混淆,vivo 所指的 30萬個點是接收端傳感器像素為 30 萬,而 iPhone X 的 3 萬個點是點陣投影器發出的散斑數量,兩者完全不是同一概念。3D 結構光方案的最大可檢測深度范圍與基線(Baseline,即發射端和接收端的距離)和傳感器分辨率成正比,即測量范圍一定時,其測量精度由基線和傳感器分辨率成正比。3D結構光的接收端像素達到百萬級,在 1m 范圍內,3D 結構光方案的測量精度遠大于 TOF 方案。

