掃地機器人智能化升級,感知模塊重要性突出。掃地機器人最早在歐美市場銷售,近年來隨著深度學習、機器視覺等AI技術的發展,掃地機器人產品的迭代不斷加快,向智能化方向升級。目前,市場主流機型可分為隨機式清掃(第一代)、規劃式清掃(第二代)和導航建圖式清掃(第三代),后兩代都具備路徑規劃技術,這使得環境感知模塊的重要性愈發突出。智能掃地機器人以自動清掃的方式解放年輕人打掃壓力,同時其智能化特性引發年輕人的“獵奇”心理,使得市場規模高速增長。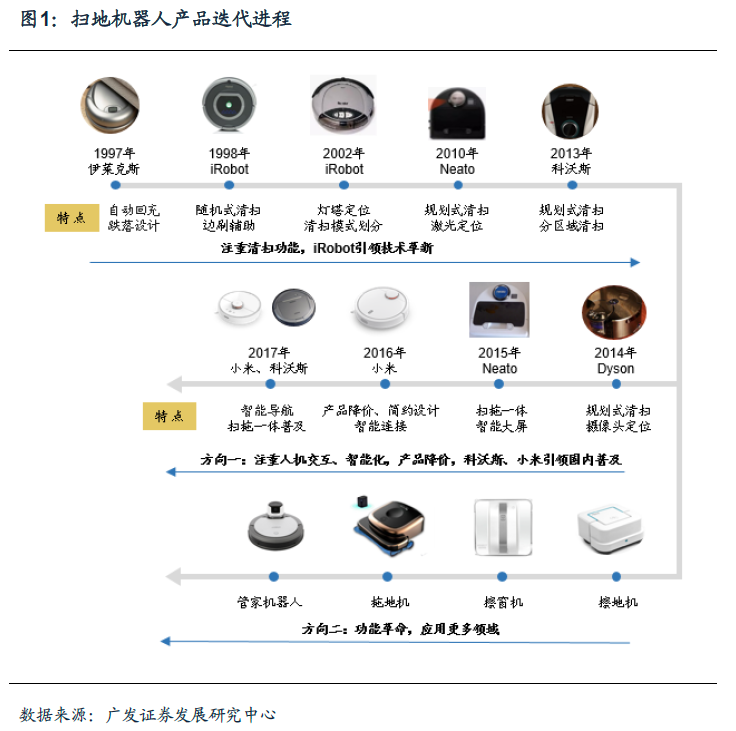
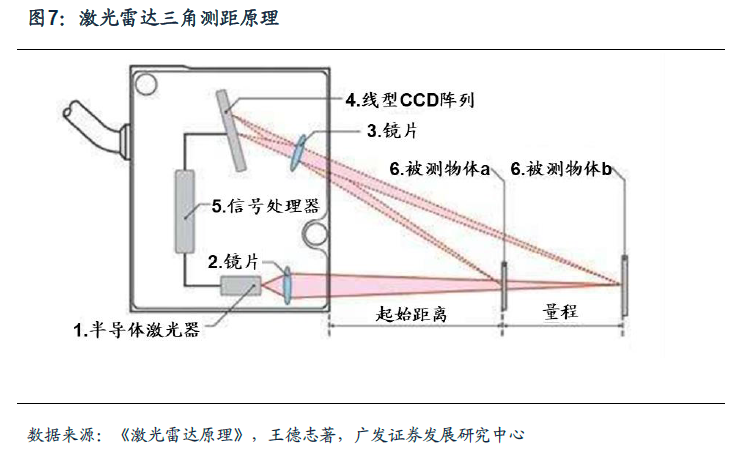
LDS 方案 :技術成熟 ,降低成本是關鍵 降低成本是關鍵 降低成本是關鍵 降低成本是關鍵。激光雷達SLAM是LDS激光測距傳感器與SLAM技術的結合。激光雷達測距LDS的原理是:從半導體激光器以一定的入射角度發射一束或n束激光照射被測物體,激光在物體表面發生散射或折射,通過透鏡對反射激光匯聚成像,光斑成像在CCD傳感器上(Charge-coupled Device,感光耦合組件)。當物體發生位移時,光斑也將隨之產生移動,其位移大小通過信號處理器的計算而獲得,由光斑位移距離計算出被測物體與基線的距離值。由于入射光和反射光構成一個三角形,位移計算運用了幾何三角定理,故又被稱為激光三角測距法。這種方法能夠獲得精度較高的距離信息。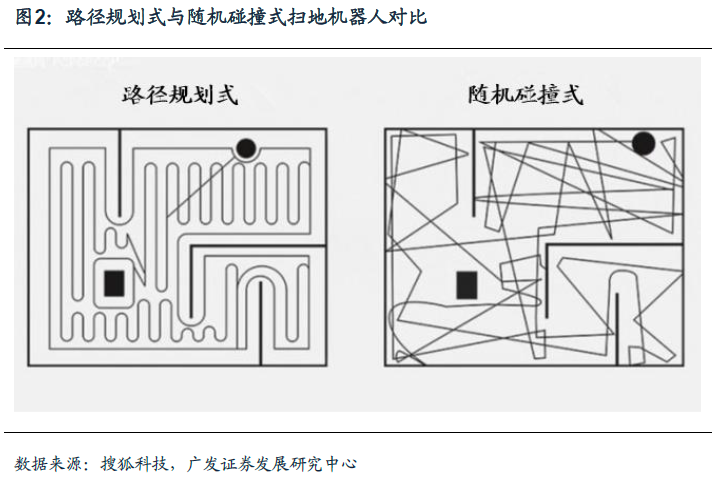
影響LDS價格的主要有兩大要素:線束數量和采購量。通常線束越高,價格越高;采購量越大,價格越低。Quanergy公司通過降低線束維度,逐步使用固態激光雷達,讓成本降低到了250美元左右,國內企業思嵐科技,可以在采購量超過1萬臺左右時,單線束的價格可以降低到1000元以內。隨著終端用戶的產品放量,激光雷達的產業化將會帶動價格打破瓶頸區域。
相比之下,對空間測距范圍需求有限的掃地機器人大多采用1線短距離LDS,相對較低的成本也有利于LDS在該領域的推廣。目前來看,新一代掃地機器人已經開始利用LDS技術替換傳統隨機碰撞式產品,例如小米和Neato的掃地機器人主要走LDS方向,而科沃斯產品則覆蓋了LDS與VSLAM技術。以小米為例,2016年公布的米家掃地機器人,搭載了小米自主研發的LDS傳感器,可以實現360°掃描,測距達到了1800次/秒。該產品會根據LDS獲取的精確距離信息,通過SLAM算法實時繪制房間地圖,提高清掃效率和質量。
因此VSLAM的穩健性是一個有挑戰的問題。為此需要引入回環檢測,就是如何有效判斷相機經過同一場景的能力。如果回環成功,通過把對比信息輸送給后端優化,提供更加有效的姿態約束,從而顯著減小累積誤差,逼近全局一致。