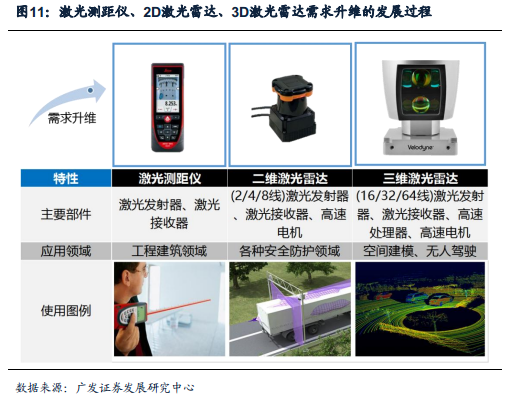
? 傳感器是智能裝備的重要感官,其研發過程往往分為兩個階段: 從技術創新到成本降低。傳感器作為智能裝備的自主輸入裝置,相當于人的各種感覺器官。 智能裝備對于外界環境的感覺主要有視覺、位置覺、速度覺、力覺、觸覺等。 智能傳感器是智能裝備獲取外界環境信息的窗口,其研發過程可以分為兩個階段:第一階段,探索需求,從未滿足的需求中誕生出新型傳感器;第二階段,為更貼合產業化應用, 研發焦點向控制成本轉變。以 3D 激光雷達為例,已經開始進入第二階段,未來成本有望下降。
? 智能裝備應用傳感器具有三種趨勢:同類傳感器結合、 多種傳感器組合、 應用場景創新。在傳統工業設備向智能化、信息化方向演進的過程中,傳感器扮演發揮了感知外部信息的作用,其應用過程呈現三大趨勢。 一、 同類傳感器疊加,單一功能上的縱向深度結合。 這種情況下傳感器之間在功能上有主導和輔助之分,先進傳感器往往發揮著縱深作用,負責核心功能的實現。 以無人駕駛汽車為例, 3D 激光雷達在感知系統中起主導作用。由于無人駕駛的高安全性需求, 其感知系統需要多種傳感器形成相互配合的冗余結構, 3D 激光雷達在感知系統中起主導作用,是無人車測距“ 三重保障” 中的第一重。 3D 激光雷達的效果和成本牽動著無人駕駛汽車的產業化進程。 二、 多種傳感器搭配,多種功能上的橫向廣度組合。 每種硬件需要完成獨立的功能模塊,因此后臺系統和算法實現更加重要。 以 Pepper 機器人為例,人工智能算法是其核心技術。 Pepper 機器人使用了多種傳感器,各種硬件在功能上并無主次,技術核心是識別表情、語言的人工智能算法。 三、 新型傳感器應用于傳統設備, 硬件升級萌發新生命力。 傳感器與傳統設備結合后發展出新的應用場景,帶來硬件組合的升級。 以掃地機器人為例, 2D 激光雷達應用于掃地機器人, 實現了激光導航式的路徑規劃, 此類產品效果與其傳統掃地機在使用上有著顯著的優勢,帶來了應用場景上的擴展和工作效率上的升級。