人形機器人起步于 1960 年代后期,以日本的研究成果最為矚目。1973 年日本早稻田大學的加藤一郎教授研發出世界上第一款人形機器人 WABOT-1,但其運動能力不足,每走一步需要 45 秒鐘。1986 年日本本田開始進行人形機器人 ASIMO 的研究,并成功于 2000 年發布第一代機型。相較于 WABOT-1,ASIMO 能跑能走、上下階梯,在運動能力方面取得較大突破。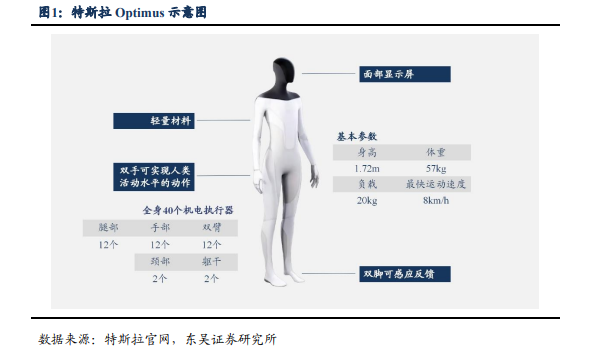
從基礎功能角度來看,人形機器人已初步具備產業化條件。從通用人形機器人的 L0-L5 的發展階段來看,其正處于 L3 向 L4 階段邁進的過程。L3 階段的機器人需要具備感知能力,能利用各種傳感器測量環境信息,通過預設程序,進行識別、理解,并反饋預設動作。L3 級別的機器人在架構上至少需要 30 個以上的自由度。L4 階段的機器人能夠通過預設行為和技能模板自主完成任務,不再需要人類的頻繁干預。L5 階段則是理想狀態的人形機器人,真正具備人類的思維和創造力。
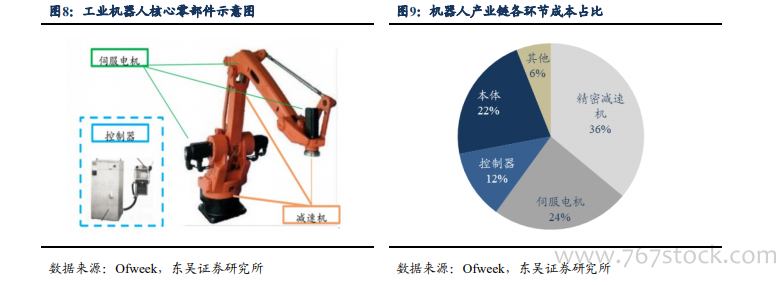
人形機器人產業鏈主要分為上中下游三部分。具體來看,上游為核心軟硬件,硬件主要包括伺服電機、減速器、控制器、傳感器等;軟件包括機器視覺、人機交互、機器學習、系統控制等;中游則是人形機器人本體制造商,國內包括優必選、北京鋼鐵科技、國外包括波士頓動力、美國敏捷機器人、日本豐田、本田、特斯拉等。下游目前還未有成熟的商業應用,可能的應用場景包括迎賓接待、展廳引導、高校科研等。