GNSS 與 IMU 融合可提供穩定的絕對位置信息。全球衛星導航系統(GNSS)是能為地球表面或近地空間任何地點提供全天候定位、導航、授時的空基無線電導航定位系統。美國的全球定位系統(GPS)、俄羅斯的格洛納斯衛星導航系統(GLONASS)、歐盟的伽利略衛星導航系統(Galileo)以及我國的北斗衛星導航系統(BDS)是全球四大衛星導航定位系統。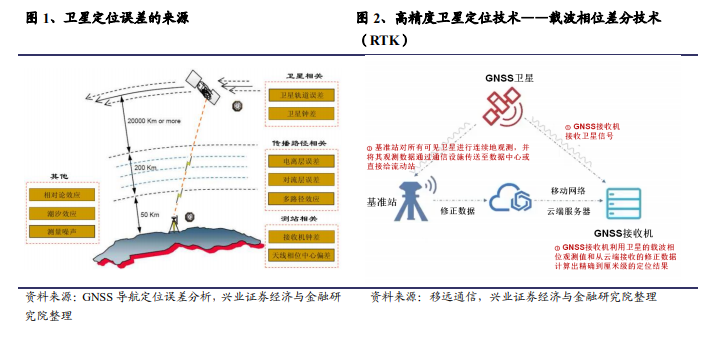
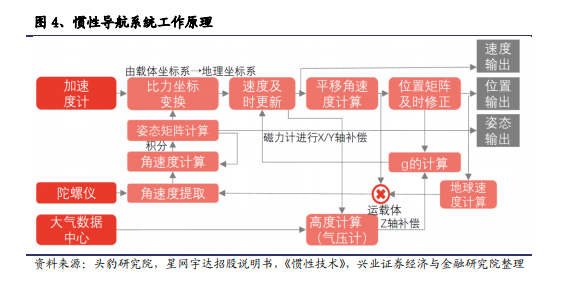
慣性導航系統(INS)屬于推算導航方式,即從一已知點的位置根據連續測得的運動體航向角和速度推算出其下一點的位置,因而可連續測出運動體的當前位置。慣性導航系統的核心部件為陀螺儀和加速度計,利用載體先前的位置、慣性傳感器測量的加速度和角速度來確定其當前位置。給定初始條件,加速度經過一次積分得到速度,經過二次積分得到位移。角速度經過處理可以得出車輛的俯仰、偏航、滾轉等姿態信息,利用姿態信息可以把導航參數從載體坐標系變換到當地水平坐標系中。
汽車電子電氣架構正逐步由分布式 ECU 向域控制器、中央集中架構方向發展。高精度定位模塊在汽車中的搭載方案主要為以下兩種:①高精度衛星定位模塊掛接到中央網關。高精度定位模塊包括衛星定位信號接入、RTK 信息接入、IMU、融合定位算法、高精度地圖單元等。該方案需要將高精度定位及高精度地圖信息通過車內網絡傳輸到自動駕駛域控制器,加大了時間延遲,降低了高精度定位的精度。