“Apollo”平臺是一套完整的軟硬件和服務系統,包括車輛平臺、硬件平臺、軟件平臺、云端數據服務等四大部分。此外,百度還將開放環境感知、路徑規劃、車輛控制、車載操作系統等功能的代碼或能力,并且提供完整的開發測試工具。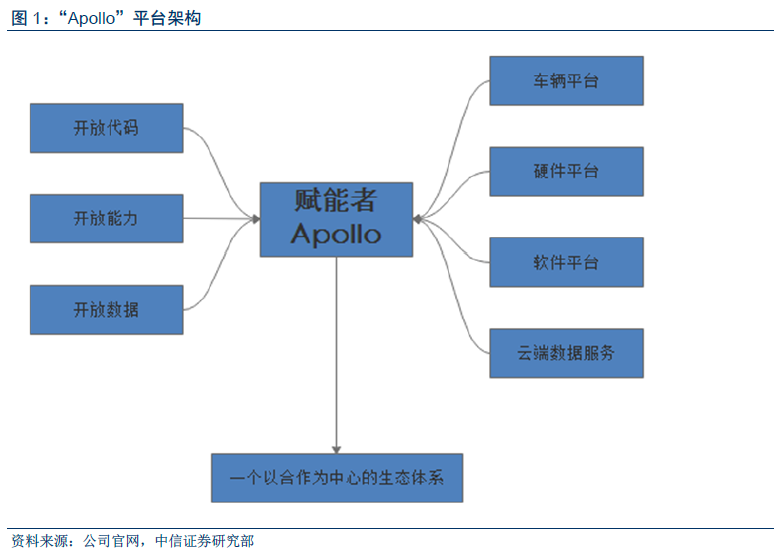
“Apollo”計劃以三種形式開放自動駕駛能力:開放代碼、開放能力、開放數據。百度集團總裁兼首席運營官陸奇表示:“開放能力是基于通過API 或者是SDK,可以通過標準公開方式來獲取百度提供的能力。開放代碼跟一般傳統開放開源軟件一樣,代碼公開,大家可以運用可以參與一起開發。我們的開放范圍包括感知體系、路徑規劃、車輛控制體系等重要的組成部分。”同時,任何一個“Apollo”的合作伙伴都可以使用 “Apollo” 技術,并且他們都有機會對“Apollo”生態做貢獻,尤其是貢獻有價值的數據資源。
高精地圖:自動駕駛的“千里眼”。百度“Apollo”平臺的高精地圖具備“精細化程度最高、生產效率最高以及覆蓋最廣”三大優勢,高精地圖的相對精度達0.1-0.2 米,能夠精細刻畫道路上的交通標志、車道線等上百種要素和屬性。百度目前擁有280 多輛采集車和40 多輛高精地圖數據采集車,構成國內最大規模的采集車隊,并依托完全自主化的軟硬件采集平臺,2017 年已經基本實現全國高速和城市快速路的全面覆蓋。“Apollo”的自定位技術則融合了高精地圖和傳感器的數據,讓每一輛車都可以低成本、全天候地精準定位。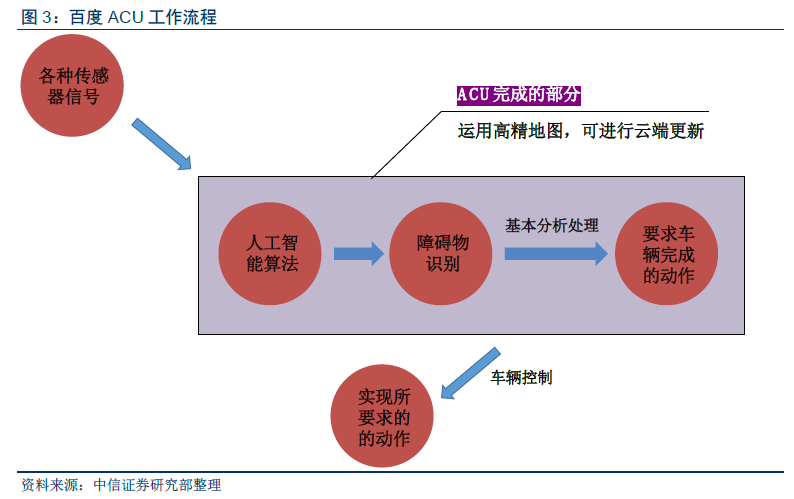
環境感知:自動駕駛的五官。“基于頂尖的大數據和深度學習技術,“Apollo”多傳感器融合的環境感知解決方案通過精準的目標識別和場景理解,使每輛車都能看清和看懂路況,包括路上的每一個障礙物、行人、車輛等,幫助車輛做出精準的路線規劃和駕駛決策。百度自身并不生產傳感器,而是與傳感器廠商合作,形成合作聯盟,百度獲得傳感器輸入的信號后進行算法處理。
決策規劃:自動駕駛的指令。在對導航、感知、預測、定位等過程的數據完成篩選和聚合后,“Apollo”的決策規劃模塊會對輸入的多維數據進行環境重構。在這個過程中,不同種類的優化器不斷進行多次循環、互相迭代,最終為無人車打造一條高質量、安全的行車路徑。